结合前不久我们团队在硅谷调研的见闻,我们认为 Optimus 第一阶段的商业化,不一定是“完全自主替代人”,而更可能是 一种“干中学”的过渡,将“劳动...
2026-05-21 9 智能制造行业报告
扫地机器人的主要功能即自动维护家庭地面清洁,让人们从重复繁重的家务劳 动中解放出来,直击家庭日常高频清扫的“痛点”。 消费升级。随着国民经济不断发展,人均可支配收入水平不断提高,且 80/90 一 代逐渐成为消费的主力军,在城市化、智能化及消费升级等因素的推动下,扫地机器 人逐渐被广大消费者所接受,特别是被年轻一代消费群体所青睐。城市化进程带来的 快节奏生活导致人们投入清理家务时间减少,而扫地机器人具备替代人力清扫的核心 能力,再加上其外观设计和内在结构上都非常具有科技感,这些特征完美匹配目前的 消费趋势。 老龄化。根据第七次人口普查数据,60岁以上老年人占比较10年前增加5.44%, 人口老龄化趋势明显。人口老龄化造成的家务清洁的不便也使得人们对家庭清洁机器 人的刚性需求客观存在。随着劳动力稀缺、劳动力成本持续攀升,用机器代替人工正 逐渐成为一种潮流。从需求端来看,一款价格合适又足够好用的扫地机器人,势必会让消费者产生很 强的购买欲。
我们以同样是为了解放双手而出现的洗衣机为例,当前城镇家庭的渗透 率已经达到百分之百,因此,扫地机器人行业的核心驱动力来自于供给端,厂商能否 持续进行技术创新,推出智能化程度足够高、清洁效果足够好且价格适中的好产品, 是扫地机器人渗透率快速提升的关键。按功能划分,扫地机器人共分为四大系统,即导航系统、清洁系统、续航系统以 及交互系统。从扫地机的发展历史来看,各厂商主要是围绕导航系统和清洁系统进行 技术升级。导航系统作为扫地机的核心部件,相当于“大脑”的角色,是一个软硬件一体的 系统,包括传感器、芯片以及构图和路径规划算法。导航系统经历了从随机碰撞到路 径规划的变革。 随机碰撞:2010 年以前的扫地机均是采用随机模式,扫地机根据简单的移动算 法,如三角形、五边形轨迹不断运行以覆盖清扫区域,如果遇到障碍,则按照算法转 向。该方式缺点一是清扫效率低,有些区域重复清扫而有些区域出现漏扫;缺点二是 缺乏避障能力,机器容易被障碍物困住,且频繁碰撞容易造成机器和家具损坏。 路径规划:2010 年,Neato 推出了全球首款基于激光雷达导航的全局规划扫地 机器人 Neato XV-11,此后众多厂商陆续推出了路径规划产品。全局规划导航技术是 目前中高端机型采取的主流导航方式,具体来看,具有规划功能的机器人依靠传感器 获取周围环境信息,然后利用特有的 AI 算法进行全屋地图构建,在此基础上科学规 划清扫路线,既避免了与障碍物的磕碰,又提高了清扫的覆盖率和效率。
")
标签: 智能制造行业报告
相关文章

结合前不久我们团队在硅谷调研的见闻,我们认为 Optimus 第一阶段的商业化,不一定是“完全自主替代人”,而更可能是 一种“干中学”的过渡,将“劳动...
2026-05-21 9 智能制造行业报告
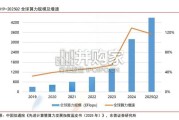
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 58 智能制造行业报告
“训练+推理”算力双轮驱动,未来全球算力需求呈指数级爆发。随着大模型快速迭代 与 AI 应用场景加速渗透,全球 AI 算力需求呈指数级爆发态势,算力基...
2026-05-17 35 智能制造行业报告
根据IDC最新报告指出,2025年全球人形机器人出货量接近1.8万台, YOY+508%,市场规模达到约4.4亿美元,主要应用于文娱商演、 科研教育、...
2026-05-17 50 智能制造行业报告

从宏观角度来看, 2020 年开始家用咖啡机市场需求增速加快,商用咖啡机市场需求放缓,原因如下:2010 -2020 年,资本进入商用咖啡机快速爆发,...
2026-05-14 44 智能制造行业报告
2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 30 智能制造行业报告
最新留言