未来全球热管理市场空间广阔。根据 BCC Research《The Market for Thermal Management Technologie...
2025-01-15 113 智能制造行业报告
柔性机器人目前分为工业和生物两大类,主要对应了制造业和医疗行业的需求。一般情况下,把柔性机器人分为两类,一类是模拟生物的柔性与灵活性创造的仿生柔性机器人,另一类则是运用机器视觉的六轴以上工业机器人。两类不完全独立,只是第一种偏向于医疗,后一种更适用于制造业。柔性机器人主要由易变形的物质组成,如液体、凝胶和弹性体,它们与生物组织和器官的弹性和流变特性相匹配。这一新兴的弹性柔软、多功能和生物激发的机器代表了一种令人兴奋的、高度跨学科的工程范式,它将彻底改变机器人在医疗保健、野外探索和合作人类互助中的作用。")
工业级柔性机器人更多的是指机器感知与传统工业机器人结合的高智能化机器人。工业级柔性机器人(soft robot)更多的指的是运用机器视觉定位系统,通过机器视觉产品(即图像摄取装置,分CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
机器感知、机器行动与人机交互是柔性机器人的三大组成部分。首先从仿生学来看,柔性机器人设计初衷在于能在各种复杂环境中代替甚至做到人类所不能,它们需要与软材料、生物或人工复制的生物功能进行交互。柔性机器人一般由机器感知、机器行动和人机交互三部分组成。机器感知中一般采用的材料都是杨氏模量1大于109Pa,而像皮肤、肌肉等结缔组织的杨氏模量为102~106Pa。机器行动依靠的是每一个活动关节处装有的驱动器(actuator)。并不是所有的柔性机器人都具有人机交互功能,这一功能一般靠深度学习和自然语言处理(NLP)完成。
标签: 智能制造行业报告
相关文章
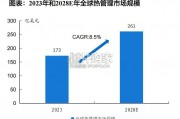
未来全球热管理市场空间广阔。根据 BCC Research《The Market for Thermal Management Technologie...
2025-01-15 113 智能制造行业报告

滑雪、滑冰场地数量增长。根据国家体育总局发布的《大众冰雪消费市场研究报告(2023-2024 冰雪季)》, 2023 年全国共用各类冰雪运动场地 28...
2025-01-09 58 智能制造行业报告

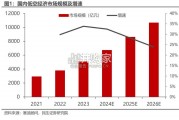
2025 年全球机器视觉市场规模有望达千亿,全球市场集中度高。随着工业自动化技 术的不断发展,机器视觉在工业领域的应用越来越多,市场规模不断扩大。据...
2025-01-03 92 智能制造行业报告
市场普遍担忧:美国加关税会导致收入降速或下滑,中国在全球份额下降,关税成本增加或转嫁导致利润率下滑。 与市场共识不同,我们发现加关税对轻工出口企业收入...
2025-01-03 79 智能制造行业报告
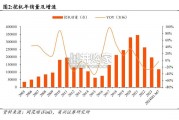
国产品牌挖机市场份额显著提升,已超过 80%。根据慧聪工程机械网 数据,2017 年国产品牌市占率达 50.4%,并在之后保持较快提升趋势,2022...
2025-01-02 65 智能制造行业报告
反无人机行业:对低空经济以及军事发展具有关键意义。我国国防建设正处 于转型关键期,装备体系不断调整。传统地面作战和近岸防御装备数量逐渐优化, 远海防卫...
2025-01-01 89 智能制造行业报告
最新留言