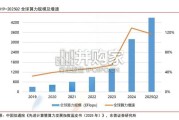
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 42 智能制造行业报告
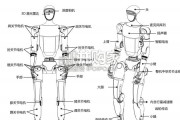
灵巧手核心为机械设计和结构设计,各家方案不一,可分为结构形式、驱动方式、传动方式、感知方式和 材料等多方面。厂商灵巧手设计采用多种融合方式。 驱动和传动为最核心设计,按照自由度与驱动源数量关系可以分为直驱和欠驱,绝大部分采用电机驱动 (空心杯、无刷有齿槽)。传动方式种类多样,包括腱绳传动、蜗轮蜗杆、连杆、齿轮、微型丝杆等。此 外触觉材料决定手部的感知能力,结构形式和使用材料影响体积、质量和寿命等。随着人形机器人下肢行走、跳跃等性能渐趋成熟,上肢灵巧手重要性开始体现。灵巧手是人形机器人操作 性能的核心,决定机器人功能的上限,是具身智能的核心,未来2-3年人形机器人工业场景性能突破,依赖 于灵巧手性能提升,而3-5年家庭场景突破依赖灵巧手+大脑。
")
标签: 智能制造行业报告
相关文章
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 42 智能制造行业报告
“训练+推理”算力双轮驱动,未来全球算力需求呈指数级爆发。随着大模型快速迭代 与 AI 应用场景加速渗透,全球 AI 算力需求呈指数级爆发态势,算力基...
2026-05-17 31 智能制造行业报告
根据IDC最新报告指出,2025年全球人形机器人出货量接近1.8万台, YOY+508%,市场规模达到约4.4亿美元,主要应用于文娱商演、 科研教育、...
2026-05-17 42 智能制造行业报告

从宏观角度来看, 2020 年开始家用咖啡机市场需求增速加快,商用咖啡机市场需求放缓,原因如下:2010 -2020 年,资本进入商用咖啡机快速爆发,...
2026-05-14 39 智能制造行业报告
2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 29 智能制造行业报告
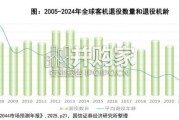
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 60 智能制造行业报告
最新留言