结合前不久我们团队在硅谷调研的见闻,我们认为 Optimus 第一阶段的商业化,不一定是“完全自主替代人”,而更可能是 一种“干中学”的过渡,将“劳动...
2026-05-21 7 智能制造行业报告
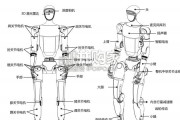
触觉传感器的柔性化:使传感器从物理特征上像皮肤一样柔软,并可以在任意载体表面进行测量,不受面积和结构影响。 触觉传感器的柔性化有三种主要的途径: 1)触觉传感器中的敏感元件单元为刚性,利用柔性材料如硅橡胶作为传播媒介,接触面不携带传感功能,仅靠刚性传感器硬件获取信息。如, 将六维力传感器放置在由硅橡胶组成的柔软皮肤内部,制成灵巧手的指尖; 2)敏感元件为刚性,由柔性组织结构组合而成,如使用网状设计,将各类电子线路嵌入柔软的薄膜上,如,可以形成网格状的集成阵列(如, 2×3的【宇树 DEX-5】等),或集成温度和触觉等(如,一种阵列式柔性传感器,薄膜的一面是半导体温度传感器,另一面是导电聚合物触觉传 感器); 3)触觉传感器自身是柔性材料,如具有压阻特性的压力敏感导电橡胶和具有压电特性的材料(如PVDF聚偏二氟乙烯等)。
")
标签: 智能制造行业报告
相关文章

结合前不久我们团队在硅谷调研的见闻,我们认为 Optimus 第一阶段的商业化,不一定是“完全自主替代人”,而更可能是 一种“干中学”的过渡,将“劳动...
2026-05-21 7 智能制造行业报告
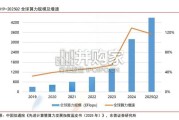
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 58 智能制造行业报告
“训练+推理”算力双轮驱动,未来全球算力需求呈指数级爆发。随着大模型快速迭代 与 AI 应用场景加速渗透,全球 AI 算力需求呈指数级爆发态势,算力基...
2026-05-17 34 智能制造行业报告
根据IDC最新报告指出,2025年全球人形机器人出货量接近1.8万台, YOY+508%,市场规模达到约4.4亿美元,主要应用于文娱商演、 科研教育、...
2026-05-17 50 智能制造行业报告

从宏观角度来看, 2020 年开始家用咖啡机市场需求增速加快,商用咖啡机市场需求放缓,原因如下:2010 -2020 年,资本进入商用咖啡机快速爆发,...
2026-05-14 44 智能制造行业报告
2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 30 智能制造行业报告
最新留言