[Download]资源名称:摩根斯坦利报告:人工智能的力量:灵活算力——AI增长的下一个浪潮(英文,60页)...
2026-05-11 28 人工智能AI行业报告
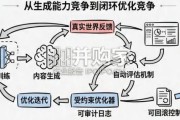
从技术路线上看,目前基于大模型的“大脑”技术路线正处在并行探索阶段,并逐 渐向端到端的大模型演进。具身智能算法层的技术路线,存在三条主流路径。 第一条是端到端 VLA 技术路线,采用单一模型直接从感知到动作的端到端学习方式, 虽然具备一定泛化能力,但主要适用于短程任务,在复杂长程任务上存在局限性。 第二条是大脑+小脑分层技术路线,这是目前相对成熟的主流方向。该路线以多模 态大模型作为“大脑”负责高层决策和任务规划,配合专门的“小脑”模型处理具体的 运动控制和执行任务,通过分层协作实现更强的任务处理能力。 第三条是世界模型技术路线,代表最前沿的探索方向。世界模型旨在构建对物理世 界的完整建模,通过预测未来状态来优化动作决策。 北京大学计算机学院助理教授仉尚航在论坛上指出,“目前 VLA 还是一个非常难的 问题,有很多研究的空间。世界模型的研究仍处于特别早期,大小脑技术路线可以实现 模块化、可泛化和可解释的一些优势。”
")
标签: 人工智能AI行业报告
相关文章

[Download]资源名称:摩根斯坦利报告:人工智能的力量:灵活算力——AI增长的下一个浪潮(英文,60页)...
2026-05-11 28 人工智能AI行业报告

[Download]资源名称:AI原生组织研究报告:OpenClaw推动组织形态重塑(47页)...
2026-05-08 47 人工智能AI行业报告

面对 AI 技术的狂飙突进,站在生产力跃升的拐点,我们更愿抛出一个积极的论断:2026 年,大模型不仅不会取代优秀的营销团队, 反而会成为企业构建核心...
2026-05-08 54 人工智能AI行业报告
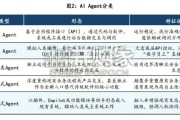
AI Agent分类体系主要围绕技术实现路径与生态影响模式展开。按技术路径,分为 API Agent与GUI Agent两类。API Agent依托标...
2026-05-07 52 人工智能AI行业报告

“十五五”时期(2026-2030 年)是我国建设社会主义文化强国的关键攻坚期,也是数字文化产业实现高质量发展、 构建全球竞争力的战略窗口期。围绕 国...
2026-05-06 36 人工智能AI行业报告
最新留言