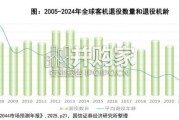
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 24 智能制造行业报告
灵巧手占据整机价值量或达17.98%,销量或以90% CAGR快速增长。目前业界将灵巧手视为解决人形机器人规模化落地应用“最后一厘 米”的关键末端执行器,占据整机价值量或达17.98%。根据高工机器人产业研究所(GGII)数据,2024年中国机器人灵巧手市场销量约 0.57万只,预计到2030年,中国机器人灵巧手市场销量将有望突破34万只,2024-2030年CAGR约为90%。当前灵巧手行业仍处于起步阶 段,随着材料、电机、传动、运控、传感等技术的持续进步与提升,灵巧手实质性产业化的拐点有望加快到来。腱绳具备轻量化、柔性化等优势。当前国内主流采用的连杆传动方案虽具备双向控制、耐用性强、制造维护便捷等优势,但其结构笨重、柔性不足、抗冲击性弱等 固有缺陷正成为技术升级的瓶颈。常见传动方案中,腱绳传动是一种通过柔性肌腱实现动力传递的机器人灵巧手关节驱动方案。由于灵巧手对紧凑性的严苛要求, 电机、减速器等大体积驱动组件难以集成到有限的手部空间内。腱绳传动可将驱动单元外置于前臂或机身,通过腱绳和滑轮结构将动力传递至手指关节。虽然腱绳 传动具备轻量柔性等优势,但在实际应用中仍存在一定挑战:布线复杂、需配备张力感知机构,以及滑轮系统中的摩擦问题等,对性能表现带来一定影响。在高自 由度设计中,系统体积和集成难度较大,例如Utah/MIT手需大量滑轮与独立驱动空间;而Pisa/IIT SoftHand虽简化驱动,却在精度上有所妥协。 腱绳主流应用材料为超高分子量聚乙烯纤维(UHMWPE)。目前主流材料为超高分子量聚乙烯纤维(UHMWPE),具备超高强度(13倍于钢)、极低密度、优异耐磨性 与化学稳定性。不过,长期处于辐射与机械载荷作用下会导致结晶度上升,从而影响韧性与摩擦学性能,限制其使用寿命与可靠性。因此,科研机构和企业正通过 表面改性与复合工艺手段进行优化,推动其在高精度、高耐久场景下的可靠应用。此外,腱绳传动可根据每个关节驱动器数量分为N型、N+1型和2N型三种配置,适 配不同自由度与控制策略。相较其他方案,其轻量化优势显著,同时支持欠驱动设计,能提升抓握灵活性与适应性。正因如此,腱绳传动被认为是当前最有可能突 破灵巧手“不可能三角”(成本—系统参数—稳定性)限制的技术路径。目前该技术已广泛应用于机器人灵巧手及仿人机器人等领域,不同配置方案为开发者在自 由度、紧凑性和控制精度等关键指标之间提供了多样化的选择空间。
")
标签: 智能制造行业报告
相关文章
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 24 智能制造行业报告
DED 为金属 3D 打印的主流技术路线之一:金属 3D 打印主要技术路线为 PBF(粉末床熔融)和 DED(定向能量沉积)。 DED 属于利用聚焦热...
2026-05-06 44 智能制造行业报告

原始设计制造商(Original Design Manufacturer, ODM 是根据品牌厂商(如三星、 OPPO、小米等)的需求,为其研发、设计...
2026-05-06 28 智能制造行业报告

矿山机械全球千亿美元市场,主要包含采矿、选矿两大环节:根据 precedence research 数据,全球矿山机械市场空 间 1330.9 亿美元...
2026-05-04 33 智能制造行业报告
人形机器人的探索史可以追溯到20世纪60年代末,而迎来产业大爆发、受到业界和资本的广泛关注则仅是近几年的事。受益 于软件端大模型和硬件端零部件的发展和...
2026-04-30 85 智能制造行业报告

2021年至今的集运牛市来源于:疫情期间的极端供需错配、消费结构 扭曲、港口大面积拥堵以及后续的地缘政治冲突;周期高度由需求刺 激打开,地缘冲突增加供...
2026-04-28 42 智能制造行业报告
最新留言