北斗千亿产值市场:根据《2024中国卫星导航与位置服务产业发展白皮书》,2023年我国卫星导航与位置服务产业总体产值达到5362 亿元人民币,较202...
2025-01-15 106 航天通讯行业报告
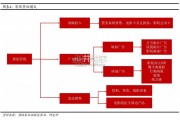
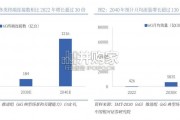
L4自动驾驶当前主要的应用场景还是在封闭园区或点到点固定线路的物流运输作 业上,而随着技术及配套政策的进一步成熟,预计自动驾驶于2023-2024年将 进入乘用车平台,乘用车应用场景是2C市场,行业增长空间将逐步打开。 根据HIS Markit的预测,到2030年,全球L4/L5渗透率达到15%,L3达到20- 30%,L1-L5自动驾驶总渗透率达到65%-70%。高精度定位+高精度地图系统是和公路等一样实现车联网落地必不可少的基础设施,既是感知层 中的一部分,又是决策层中重要的模块,服务于控制层。 高精度地图提供格式化存储交通场景中的各种交通要素,包括传统地图的道路网数据、车道网络 数据、车道线以和交通标志等数据。 高精度地图+高精度定位的技术组合能够提供表征路面特征的精准信息和定位,结合传感器识别 的道路上的其它车辆以及行人信息,共同做出驾驶决策。
高精度地图+高精度定位技术解决了感知和应用层面的两大难题。 难题一:自动驾驶的感知层多受传感器感知,当自动驾驶达到L3及以上,对精度和稳定性的要求越来越 高,此外在极端场景例如恶劣天气,激光雷达和视觉传感器的识别感知作用会受到影响; 难题二:高精地图定位系统弥补了传统GPS定位的不稳定性。绝对定位会受GPS信号的影响,比如很长 的隧道或山区,在沙漠或无车道线的地带,由于缺乏相对物的参照,视觉和雷达传感器无法做出精确的 相对定位。相比之下高精地图和高精定位能够在极端场景保持稳定的车辆感知和定位。
高精度定位的实现——引入RTK技术 。传统的GNSS系统单点定位其原理是通过接收器与至少4颗卫星通讯来确定该 接收器的位置,用来确定维度、经度、高度及时间四个变量,由于存在大气 离层的干扰,定位精度仅为米级(10m),无法满足自动驾驶所需要的精度。 为纠正误差,引入RTK(载波相位差分技术)技术。在RTK作业模式下,基 准站通过数据链将其观测值和测站坐标信息一起传送给GNSS接收机。接收 机不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系 统内组成差分观测值进行实时处理,同时给出厘米级定位结果。
为了应对不同场景,将高精度GNSS引入移动通信网络控制面,不仅支持单播改正数的播放还支持广播的方式。 ① 运营商定位服务器可以从参考站获得观测值,该参考站可以为第三方参考站,即基于蜂窝网络中基站进行改造升级的参考站。 ② 在一个小区内,基站的位置可以看作用户的概略位置,定位服务器通过部署方式或者基站上报方式获得基站的位置信息。 ③ 定位服务器,基于获得基站的位置信息以及参考站的测量值,进行建模并生成改正数,根据应用场景的不同以单播或广播的 形式发送给终端。 ④ 终端获取改正数后进行定位解算。
")
相关文章
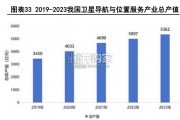
北斗千亿产值市场:根据《2024中国卫星导航与位置服务产业发展白皮书》,2023年我国卫星导航与位置服务产业总体产值达到5362 亿元人民币,较202...
2025-01-15 106 航天通讯行业报告

Spotify(SPOT.US):Spotify 是音乐流媒体领域的全球领导者,市场占有率约 30%。公司业务几乎覆盖全球市场,在拉丁美洲和其他地区的...
2025-01-14 120 TMT行业报告

短剧行业的发展历经了三个重要的阶段,在萌芽阶段(2018-2019年),长视频平台率先布局短剧领域,短视频平台也紧随其后开始涉足。这一时期,短剧作为一...
2025-01-09 66 TMT行业报告

广告市场需求与宏观经济环境高度相关,2019年,广告主对整体经济市场的信心波动致使中国广告市场重新进入调整期,新冠疫情 的爆发加剧了市场缩减的态势。2...
2025-01-06 54 TMT行业报告
影院营收:影院业务的营业收入主要包括放映收入、广告收入和卖品销售。放映收入 方面,三大收入来源分别为票务系统售票、电影卡及兑换券、影院会员卡;广告收入...
2025-01-02 81 TMT行业报告
最新留言