在电动化、智能化浪潮下,中国汽车零部件产业迎来历史性的发展机遇,在多个细分赛道上 加速实现国产替代,但想要迈向更高阶的成长,全球化是必然选择。海外市场...
2026-05-27 22 汽车行业报告
单目摄像头通过计算机视觉与人工智能算法对摄像头获取的信息进行分析,获取有用 的信息并做出相应的判断。Mobileye 即是单目摄像头解决方案的领先者。目前。单目摄像 头解决方案已经相对成熟,且成本低廉,广泛搭载于各类汽车上,用于对路况的判断。但 同时,单目摄像头也存在一定的劣势。由于单个摄像头无法获取景深,在测量车辆与障碍 物之间的距时需要根据算法在图像识别匹配目标物体之后,通过其在图像中的大小去估算 目标距离。这一方式对算法水平要求极高,同时需要大量的数据训练保证准确率。同时, 由于车载单目摄像头很难频繁变焦,导致了视觉系统难以采集不同焦距下的环境图像。因 此,Mobileye、特斯拉等厂商逐渐开始倾向于使用双目或多目摄像头来解决不同距离下摄 像头看清、看准的问题。 相比于单目视觉,双目视觉(Stereo Vision)的关键区别在于可以利用双摄像头从不 同角度对同一目标成像,从而获取视差信息,推算目标距离。
在 ADAS 应用中,如果采用 单目摄像头,为了识别行人和车辆等目标,通常需要大规模的数据采集和训练来完成机器 学习算法,并且难以识别不规则物体;而利用毫米波雷达和激光雷达进行测距的精度虽然 较高,但是成本和难度亦较高。所以,双目视觉的最大优势在于维持开发成本相对较低的 前提下,保证了一定精度的目标识别和测距。但同时,双目摄像头也存在一定的缺点。首 先,因为增加了一个镜头,带来更多运算量,整个摄像头模组的性能要求和成本都更高, 系统也容易产生更大的误差。其次,在两者都有的标定工作上,双目要比单目更加复杂, 而且选择双目方案依然要需要一个庞大的数据库训练模型从而实现目标识别,因此算法的 开发难度也不低。目前市场上采用双目摄像头系统的主要是斯巴鲁的 Subaru EyeSight 系 统、百度推出的部分 Apollo L4 摆渡车以及欧盟自主泊车项目 V-Charge。整体而言,双目 摄像头功能更加强大、测度更加精准,但成本比单目摄像头高,因此目前多搭载于高档汽 车,属于较为常用的视觉解决方案。
")
标签: 汽车行业报告
相关文章
在电动化、智能化浪潮下,中国汽车零部件产业迎来历史性的发展机遇,在多个细分赛道上 加速实现国产替代,但想要迈向更高阶的成长,全球化是必然选择。海外市场...
2026-05-27 22 汽车行业报告

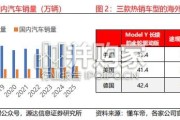
从图表数据来看,2026 年 1-2 月全国新能源汽车市场呈现明显下滑态势。1 月销量 56.6 万辆,同比下降 19.77%;2 月销量 43.1...
2026-05-22 41 汽车行业报告

同城货运正经历从“熟车依赖”到“智能运力”的深层变革。长期以来,批发市场到路边店的配送高度依赖货主自有车辆或熟车司机,难以规避请假、加价等博弈成本,...
2026-05-21 28 汽车行业报告
全面考察智驾安全性能,保障智驾可持续发展。为保障组合驾驶辅助系统能够正确响应复杂多变的真实交 通情况及使用过程中潜在的安全风险,标准不仅对功能边界、能...
2026-05-21 35 汽车行业报告

减震器:负责抑制弹簧吸震后反弹时的震荡,传统减震器主要为液压减震器,多为双筒(复筒)结构, 由活塞、缸筒、油液、阀门组成,工作原理围为液压阻尼耗能,油...
2026-05-18 32 汽车行业报告

北京车展规模持续扩容,参展面积从 2020 年 20 万平方米稳步增长至 2026 年 38 万平方米,展馆空间持续扩张。展车数量与全球首发新车数量增...
2026-05-12 35 汽车行业报告
最新留言