在宏观产业判断之外,电动超轻型飞行器的发展潜力,还可以通过对eVTOL 及城市空中交通(UAM 市场规模的拆解进行更具工程化和产业化逻辑的量化 分析。...
2026-06-09 17 智能制造行业报告
运动控制器由轨迹生成器、插补器、控制回路和步序发生器四部分构成。首先由轨迹生成 器计算出任务希望的理想轨迹,插补器根据位置或速度反馈单元的实际状态,按照轨迹生 成器的要求,计算出驱动单元下一步将要执行的命令,然后交由控制回路进行精确控制。 如果是步进电机,则还有一部分就是步序发生器,步序发生器根据控制回路控制指令进一 步生成控制相序和脉冲,达到控制运动对象的目的。运动控制器的硬件按照核心器件组成包括基于微处理器(MCU)、专用芯片(ASIC)、PC-Based、 数字信号处理芯片(DSP)、可编程逻辑控制器(PLC)、多核处理器等。随着技术的进步和 完善,运动控制器从以单片机、微处理器或专用芯片作为核心处理器,发展到以 DSP 和 FPGA 作为核心处理器的通用开放式运动控制器。
为实现高速度、高精度运动控制,伺服系统需对距离、位移、速度、加速度(力)、角度、 角速度、角加速度等参数进行检测,并通过实时监测实现闭环反馈,需要与传感器进行配 套使用。工业机器人广泛应用于工业自动化领域,控制系统是机器人的核心部分,其功能强弱、性 能优劣直接影响机器人的最终性能。通常采用 PC 上位机+专用运动控制器的架构,以 PC 为上位机完成人机交互和运动轨迹规划,重点设计了基于DSP和FPGA的专用运动控制器, 其中 DSP 完成机器人运动控制任务的调度,实现对机器人关节空间的实时控制,FPGA 则 用于控制系统所需各功能接口的设计。实现了直角坐标空间的机器人轨迹规划和速度控制, 具备直线和圆弧基本轨迹插补算法及 S 形曲线加减速算法,改善机器人前端运动的平稳性。
")
标签: 智能制造行业报告
相关文章
在宏观产业判断之外,电动超轻型飞行器的发展潜力,还可以通过对eVTOL 及城市空中交通(UAM 市场规模的拆解进行更具工程化和产业化逻辑的量化 分析。...
2026-06-09 17 智能制造行业报告
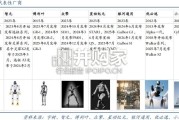
2026年的重要进展包括:(1)宇树:2026年再登春晚,携G1与H2人形机器人献上集群武术表演,3月上交所受理宇 树科技科创板IPO申请。(2)智元...
2026-06-08 43 智能制造行业报告

底层逻辑在于:海外收入保持正增长,海外收入占比中枢继续提升。25H1五家主要的主机厂出口收入均保持正向增长。结构端,主机厂海外收入 占比中枢均已经来到...
2026-06-07 26 智能制造行业报告
人形机器人是人工智能与高端制造的终极融合形态,正成为全球科技竞争新高地。作 为“具身智能”的物理载体,它通过模仿人类形态与运动方式,集成了感知、决策、...
2026-06-06 33 智能制造行业报告

工业阀门作为通用设备的重要品类在国民经济中有着广泛应用,是能源、石化、电力、 冶金等行业装备、机械与管线等固定资产中的关键设备之一。 根据华经产业研究...
2026-06-05 18 智能制造行业报告

中国航发MRO正在进入一个“需求快速上行、供给深度稀缺、产业重构加速推进”的新阶段。未来行业最大的机会,不在低端维修量的扩张,而在深度修 理能力、本地...
2026-06-02 31 智能制造行业报告
最新留言