2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 20 智能制造行业报告
精密减速器的传动误差与扭转特性对工业机器人的定位精度和重复精度影响明显。RV减速器和谐波减速器的主要性能指标有:额定输出转矩、额定输出转速、额定输入功率、 额定寿命、回差(背隙)、滞回特性、扭转刚度、角度传递误差、转动惯量、传动比、启停允许转矩、瞬时最大转矩、重量、噪声等。其中额定参数、允许参数、转动惯量 和传动比等主要为设计制造时确定的静态指标。 在工业机器人领域为了保证机器人减速器的动态特性、使用寿命、保证工作的稳定性及可靠性,以及降低运转中的噪声等,对减速器的技术指标有一定检测及计量需求。 精 密减速器的传动误差与扭转特性对工业机器人的定位精度和重复精度影响明显,同时扭转刚性和动态特性与机器人的动态性能关系紧密。RV减速器、谐波减速器和行星减速器性能有较大差异。机器人关节减速器(精密减速器)需要具有传动链短、体积小、功率大、质量轻和易控制等特点,RV减速器体积大、 负载重,多用于大臂、肩部等大关节;谐波减速器体积小,负载轻,多用于腕部、手部等小关节;行星减速器高刚性,高耐磨,多用于直角坐标机器人及传统工业自动化中。
")
标签: 智能制造行业报告
相关文章
2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 20 智能制造行业报告
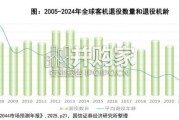
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 44 智能制造行业报告
DED 为金属 3D 打印的主流技术路线之一:金属 3D 打印主要技术路线为 PBF(粉末床熔融)和 DED(定向能量沉积)。 DED 属于利用聚焦热...
2026-05-06 50 智能制造行业报告

原始设计制造商(Original Design Manufacturer, ODM 是根据品牌厂商(如三星、 OPPO、小米等)的需求,为其研发、设计...
2026-05-06 37 智能制造行业报告

矿山机械全球千亿美元市场,主要包含采矿、选矿两大环节:根据 precedence research 数据,全球矿山机械市场空 间 1330.9 亿美元...
2026-05-04 35 智能制造行业报告
人形机器人的探索史可以追溯到20世纪60年代末,而迎来产业大爆发、受到业界和资本的广泛关注则仅是近几年的事。受益 于软件端大模型和硬件端零部件的发展和...
2026-04-30 93 智能制造行业报告
最新留言