供应链梳理:电机、驱动板、运控算法等核心部件自研;减速器齿轮来自美湖股份,交叉滚子轴承来自洛阳 佰纳,灵巧手来自宇树自研、因时机器人、睿尔曼、强脑科技...
2026-05-23 21 智能制造行业报告
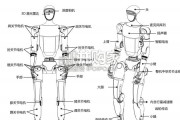
力觉传感器是感知并度量力的传感器, 六维力传/力矩传感器信息最全、技术壁垒最高。 最常见的是一维、三维和六维力传感器,二维和五维的力觉传感器较少。六维力/力矩传感器, 指的是在指定的直角坐标系内,能同时测量沿三个坐标轴方向的力和绕三个坐标轴方向的力矩。 六维力/力矩传感器是维度最高的力觉传感器,它能给出最为全面的力觉信息, 对于机器人产业 链和其它智能装配来说非常重要,同时技术难度和使用难度都比较大。根据优必选的人形机器人参数,其采用了 4 个六维力/力矩传感器,分别应用在人形机器人的手腕、脚踝处,此外鑫 精诚还研发了在灵巧手应用的微型六维力传感器。六维力传/力矩传感器技术壁垒高,ATI 为 全球龙头,国内企业中坤维科技、宇立仪器、鑫精诚、蓝点触控均有一定的技术积淀。GGII 预测到 2030 年,全球人形机器人领域力传感器市场规模将达 328 亿元,其中人形机器人领域 六维力传感器市场规模将达 138 亿元。电子皮肤是一种先进的柔性触觉传感器。电子皮肤高度模拟生物皮肤,轻薄柔软、可拉伸、 甚至可自我修复,并对温度、湿度、硬度、粘度的感知能力,应用在医疗、机器人、可穿戴领 域。Optimus gen-2 手部或集成了柔性触觉传感器,更全面地感知物体和环境,在演示视频中, 机器人展现出了出色的控制能力,可以轻松地操作拿起鸡蛋。MEMS 惯性传感器是将物体运动的加速度、位置和姿态转换为电信号的器件,包括MEMS 加速度计、MEMS 陀螺仪、磁力计和惯性测量单元(IMU)。据 Yole,全球 MEMS 惯性传感器市场规模从 2018 年 28.31 亿美元、31.21 亿颗增长至 2021 年 35.09 亿美元、39.39 亿颗,预计 2027 年增长至 49.43 亿美元、60.60 亿颗;其中,IMU 是主要的 MEMS 惯性传感 器产品,2021 年,IMU、加速度计、陀螺仪、磁力计的占比分别是 52.15%、34.74%、10.66%、 2.45%。目前,人形机器人解决方案仍在持续迭代中,关于 IMU 的使用数量和位置尚无定论, 根据论文“Multi-IMU Proprioceptive State Estimator for Humanoid Robots”,在人形机器人放入 5 个 IMU 可以显著改进运动学模型,所获轨迹估计更为准确,并且可以构建相对地面实况几 乎没有失真的高程图;目前,优必选人形机器人采用了 1 个高精度惯性传感器。
")
标签: 智能制造行业报告
相关文章

供应链梳理:电机、驱动板、运控算法等核心部件自研;减速器齿轮来自美湖股份,交叉滚子轴承来自洛阳 佰纳,灵巧手来自宇树自研、因时机器人、睿尔曼、强脑科技...
2026-05-23 21 智能制造行业报告

结合前不久我们团队在硅谷调研的见闻,我们认为 Optimus 第一阶段的商业化,不一定是“完全自主替代人”,而更可能是 一种“干中学”的过渡,将“劳动...
2026-05-21 36 智能制造行业报告
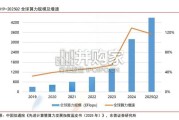
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 68 智能制造行业报告
“训练+推理”算力双轮驱动,未来全球算力需求呈指数级爆发。随着大模型快速迭代 与 AI 应用场景加速渗透,全球 AI 算力需求呈指数级爆发态势,算力基...
2026-05-17 45 智能制造行业报告
根据IDC最新报告指出,2025年全球人形机器人出货量接近1.8万台, YOY+508%,市场规模达到约4.4亿美元,主要应用于文娱商演、 科研教育、...
2026-05-17 61 智能制造行业报告

从宏观角度来看, 2020 年开始家用咖啡机市场需求增速加快,商用咖啡机市场需求放缓,原因如下:2010 -2020 年,资本进入商用咖啡机快速爆发,...
2026-05-14 45 智能制造行业报告
最新留言