从宏观角度来看, 2020 年开始家用咖啡机市场需求增速加快,商用咖啡机市场需求放缓,原因如下:2010 -2020 年,资本进入商用咖啡机快速爆发,...
2026-05-14 25 智能制造行业报告
灵巧手结构精密复杂,真实人手的单手自由度是21个,机器人的灵巧手会根据特定场景简化功能,平衡成本和自由度的关系,目 前特斯拉机器人单手自由度仅11个。灵巧手的性能和成本受其三大核心组件—驱动、传动和传感装置的共同影响。 灵巧手有多种驱动路线,差异主要体现在驱动形式和传动形式。驱动源是影响灵巧手体积和重量的重要因素,灵巧手模组的驱动 方式包括电机驱动、气压驱动、液压驱动和形状记忆合金驱动。灵巧手的操作稳定性和灵活性指标主要取决于传动系统,传动模 式包括连杆传动、腱绳传动、齿轮传动等。特斯拉目前驱动方案采用的空心杯+行星减速箱+编码器+驱动器+传感器的结构,传 动方案采用的是金属腱绳+蜗轮蜗杆传动的结构。 灵巧手电驱动采用的电机方案路线众多,不同电机方案的模组构成不同。最常用的是空心杯电机,其特点是轻量高效,因扭矩相 对较低常需要搭配行星齿轮减速器使用,主要供应厂商有Maxon、Faulhaber。无框力矩电机,无背隙可以直接驱动负载,不需 要皮带、齿轮等传动装置;无刷有齿槽电机,相比空心杯电机模组转速更低可以节省齿轮箱。除电机方案之外,灵巧手模组其他 结构件路线各异,减速器包括谐波减速器、行星减速器等,传感器有力传感器、触觉传感器等多种形式。
")
标签: 智能制造行业报告
相关文章

从宏观角度来看, 2020 年开始家用咖啡机市场需求增速加快,商用咖啡机市场需求放缓,原因如下:2010 -2020 年,资本进入商用咖啡机快速爆发,...
2026-05-14 25 智能制造行业报告
2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 24 智能制造行业报告
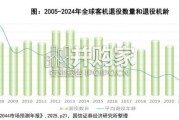
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 52 智能制造行业报告
DED 为金属 3D 打印的主流技术路线之一:金属 3D 打印主要技术路线为 PBF(粉末床熔融)和 DED(定向能量沉积)。 DED 属于利用聚焦热...
2026-05-06 52 智能制造行业报告

原始设计制造商(Original Design Manufacturer, ODM 是根据品牌厂商(如三星、 OPPO、小米等)的需求,为其研发、设计...
2026-05-06 40 智能制造行业报告

矿山机械全球千亿美元市场,主要包含采矿、选矿两大环节:根据 precedence research 数据,全球矿山机械市场空 间 1330.9 亿美元...
2026-05-04 36 智能制造行业报告
最新留言