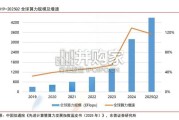
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 49 智能制造行业报告
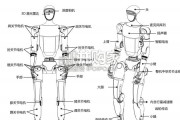
灵巧手是一种末端执行器,相较于传统的工业机器人,其将手腕连接处的工具替换为手爪。 人形机器人应用场景更为复杂,对灵巧手精细化提出要求,使得其从双指/多指向五指仿人手进 行迭代。应用于工业机器人的双指/多指手爪功能较为单一,一般只支持夹取、上下料等简单工 作;而人形机器人的灵巧手需要实现更为精细化的功能,比如捏取易碎物品、可适应不同物品 的特性和形状等,故而要求其为仿人手打造。手的十三种基本的功能:悬垂、托举、触摸、推压、击打、动态操作、球形掌握、球形指尖 握、柱状抓握、勾拉、二指尖捏、多指尖捏、侧捏等。手的功能建立在手与上肢的皮肤、筋 膜、关节、肌肉等“执行器官”完整的基础上,并实现于神经系统多层级的精密调控与信息 整合处理。 人手自由度共有21个(不考虑手腕关节):从解刨学角度看前端四指每个手指有4个自由度 ,其中掌指关节(MCP)具有2个轴线垂直相交的转动自由度,合计16个;大拇指5个,合计 21个。 灵巧手为了实现人手所能实现的功能,也要求具备与人手相差无几的自由度,以特斯拉 Optimus Gen3 为例,预计拥有22个自由度。
")
标签: 智能制造行业报告
相关文章
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 49 智能制造行业报告
“训练+推理”算力双轮驱动,未来全球算力需求呈指数级爆发。随着大模型快速迭代 与 AI 应用场景加速渗透,全球 AI 算力需求呈指数级爆发态势,算力基...
2026-05-17 31 智能制造行业报告
根据IDC最新报告指出,2025年全球人形机器人出货量接近1.8万台, YOY+508%,市场规模达到约4.4亿美元,主要应用于文娱商演、 科研教育、...
2026-05-17 44 智能制造行业报告

从宏观角度来看, 2020 年开始家用咖啡机市场需求增速加快,商用咖啡机市场需求放缓,原因如下:2010 -2020 年,资本进入商用咖啡机快速爆发,...
2026-05-14 40 智能制造行业报告
2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 29 智能制造行业报告
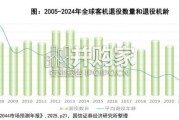
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 61 智能制造行业报告
最新留言