万代南梦宫——全球顶级IP巨头,在国内有极强的消费认知。以高达为切入点,万代南梦宫将中国作为重点布局市场,后续更多IP有望持续引进。 1)万代南梦宫:...
2025-01-19 2 大消费报告
LDS 方案 :技术成熟 ,降低成本是关键 降低成本是关键 降低成本是关键 降低成本是关键。激光雷达SLAM是LDS激光测距传感器与SLAM技术的结合。激光雷达测距LDS的原理是:从半导体激光器以一定的入射角度发射一束或n束激光照射被测物体,激光在物体表面发生散射或折射,通过透镜对反射激光汇聚成像,光斑成像在CCD传感器上(Charge-coupled Device,感光耦合组件)。当物体发生位移时,光斑也将随之产生移动,其位移大小通过信号处理器的计算而获得,由光斑位移距离计算出被测物体与基线的距离值。由于入射光和反射光构成一个三角形,位移计算运用了几何三角定理,故又被称为激光三角测距法。这种方法能够获得精度较高的距离信息。")
影响LDS价格的主要有两大要素:线束数量和采购量。通常线束越高,价格越高;采购量越大,价格越低。Quanergy公司通过降低线束维度,逐步使用固态激光雷达,让成本降低到了250美元左右,国内企业思岚科技,可以在采购量超过1万台左右时,单线束的价格可以降低到1000元以内。随着终端用户的产品放量,激光雷达的产业化将会带动价格打破瓶颈区域。
相比之下,对空间测距范围需求有限的扫地机器人大多采用1线短距离LDS,相对较低的成本也有利于LDS在该领域的推广。目前来看,新一代扫地机器人已经开始利用LDS技术替换传统随机碰撞式产品,例如小米和Neato的扫地机器人主要走LDS方向,而科沃斯产品则覆盖了LDS与VSLAM技术。以小米为例,2016年公布的米家扫地机器人,搭载了小米自主研发的LDS传感器,可以实现360°扫描,测距达到了1800次/秒。该产品会根据LDS获取的精确距离信息,通过SLAM算法实时绘制房间地图,提高清扫效率和质量。
因此VSLAM的稳健性是一个有挑战的问题。为此需要引入回环检测,就是如何有效判断相机经过同一场景的能力。如果回环成功,通过把对比信息输送给后端优化,提供更加有效的姿态约束,从而显著减小累积误差,逼近全局一致。
相关文章

万代南梦宫——全球顶级IP巨头,在国内有极强的消费认知。以高达为切入点,万代南梦宫将中国作为重点布局市场,后续更多IP有望持续引进。 1)万代南梦宫:...
2025-01-19 2 大消费报告
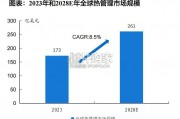
未来全球热管理市场空间广阔。根据 BCC Research《The Market for Thermal Management Technologie...
2025-01-15 114 智能制造行业报告

从全球来看,按 2023 年 GMV 计,全球拼搭角色类玩具行业集中度较高,前两名海外 龙头玩具厂商占据 75.4%的市场份额,中国品牌布鲁可排名第三...
2025-01-12 73 大消费报告

滑雪、滑冰场地数量增长。根据国家体育总局发布的《大众冰雪消费市场研究报告(2023-2024 冰雪季)》, 2023 年全国共用各类冰雪运动场地 28...
2025-01-09 58 智能制造行业报告

2025 年全球机器视觉市场规模有望达千亿,全球市场集中度高。随着工业自动化技 术的不断发展,机器视觉在工业领域的应用越来越多,市场规模不断扩大。据...
2025-01-03 92 智能制造行业报告
市场普遍担忧:美国加关税会导致收入降速或下滑,中国在全球份额下降,关税成本增加或转嫁导致利润率下滑。 与市场共识不同,我们发现加关税对轻工出口企业收入...
2025-01-03 79 智能制造行业报告
最新留言