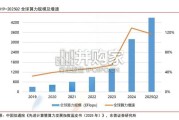
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 48 智能制造行业报告
具有降低电机高转速,提升扭矩,加强输出端负载能力的作用。按 照传动原理,减速器可分为一般齿比减速和少齿差两种。相同尺寸下的少 齿差减速器额定输出扭矩较高,主要包括行星减速器、谐波减速器、摆线 针轮减速器以及 RV 减速器等。 以少齿差减速器为例。精密行星减速器整体结构紧凑,传动比较小,可以 通过双级或多级结构提高输出扭矩;摆线针轮减速器主要为偏心传动,额 定功率下输出功率较大;RV 减速器在摆线针轮减速原理的基础上加上第一 级渐开线行星传动,在缩小尺寸和重量的同时,传动比、承载能力更大, 传动效率更高,精度更高;谐波减速器主要依靠柔轮传动,具有结构简单、 体积小、质量小、传动比范围大、承载能力大等特点。 1.1 减速器主要分为一般齿比减速和少齿差减速两类。减速器是连接动力源和执行机构的中间机构,具有匹配转速和传递转矩的 作用。减速器是由多个齿轮组成的传动零部件。由于多数机械设备不适宜 用原动机直接驱动,减速器可将传动设备在高速运转时的动力,通过输入 轴上的小齿轮啮合输出轴上的大齿轮,以达到降低转速和增大扭矩的目的。
不同于当下市场简单将减速器分为通用减速器、专用减速器和精密减速器, 我们根据其传动原理将减速器分为两类:一般齿比减速和少齿差减速。 一般齿比减速:主要依靠输入轴小齿轮和输出轴大齿轮啮合形成的减速, 大齿轮的齿数一般为小齿轮齿数的减速比倍。主要包括圆柱齿轮减速器、 蜗轮蜗杆减速器。 圆柱齿轮减速器利用输入轴小齿轮与输出轴大齿轮啮合,小齿轮带动 大齿轮运动,实现减速目的; 蜗轮蜗杆减速器是通过空间交错的蜗轮蜗杆两轴动力传动,以蜗杆为 主动件,蜗轮为被动件,利用齿轮减速。 少齿差减速:少齿差传动中,两轮的齿数差通常为 1~4,依靠特殊的传动 结构或传动级数,达到较高传动比。少齿差减速器主要包括行星减速器、 三环减速器、摆线针轮减速器、谐波减速器、滤波减速器。 行星减速器是利用驱动源启动太阳齿轮,太阳轮带动行星齿轮运转, 动力从链接行星轮的内齿轮环和出力轴输出,实现减速;RV 减速器是通过行星齿轮减速机构作为第一级减速,外加摆线针轮减 速机构作为第二级减速,通过刚性盘与输出盘连接整体机构,最终将 减速输出; 谐波减速器是靠波发生器装配上柔性轴承使柔性齿轮发生可控弹性变 形,并于刚性齿轮相啮合来传递运动和动力的齿轮传动。
")
标签: 智能制造行业报告
相关文章
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 48 智能制造行业报告
“训练+推理”算力双轮驱动,未来全球算力需求呈指数级爆发。随着大模型快速迭代 与 AI 应用场景加速渗透,全球 AI 算力需求呈指数级爆发态势,算力基...
2026-05-17 31 智能制造行业报告
根据IDC最新报告指出,2025年全球人形机器人出货量接近1.8万台, YOY+508%,市场规模达到约4.4亿美元,主要应用于文娱商演、 科研教育、...
2026-05-17 44 智能制造行业报告

从宏观角度来看, 2020 年开始家用咖啡机市场需求增速加快,商用咖啡机市场需求放缓,原因如下:2010 -2020 年,资本进入商用咖啡机快速爆发,...
2026-05-14 40 智能制造行业报告
2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 29 智能制造行业报告
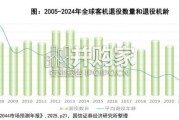
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 61 智能制造行业报告
最新留言