机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 23 智能制造行业报告
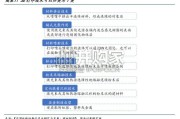
主动柔顺控制需要机器人获取对力信息和位置信息的反馈,利用力 与位置的反馈信息结合相应算法去主动控制机器人运动或者作用力,分为直接力控和间接 力控、混合位置/力控。 间接力控:间接力控不是单纯的控制力或者控制位置,而是控制力与位置的相对关系,使 得与机械臂的末端弹性结构通过软件算法来实现力控。间接力控根据控制原理的不同又分 为导纳控制和阻抗控制。 1)导纳:导纳控制广泛应用于实现机器人的主动柔顺从而完成拖动示教,其主要原因是 导纳控制器能够建立环境与机器人之间的动态关系,利用虚拟刚度、阻尼、惯性参数创建 从力到运动的映射。通过调节上述三种参数,改变机器人柔顺特性,使机器人服从人类施 加的力并做出相应的运动。
阻抗:阻抗控制是将控制器等效为阻抗系统,输入位置输出力。是由 Hogan 于 1985 年提出的主动柔顺控制策略,是目前柔顺控制使用较多的方法之一。阻抗控制本质为建立 机器人在与环境交互过程中所受外界环境交互力与机器人姿态之间的映射关系,从而实现 根据外界交互力调节机器人姿态的功能,进而实现机器人的主动柔顺。被动柔顺控制指的是在力觉控制的末端执行器环节安装一个机械弹性结构(弹簧、阻尼), 进而实现力控,Starl ETH 机器人属于这类力控方式,根据 StarlETH 机器人的相关论文 表明,Starl ETH 内部的核心元件是高柔顺性系列弹性制动器,这种设计实现了扭矩的可 控性,并且能够对接头角度、电机角度、弹簧的偏转实现精准测量。 Starl ETH 机器人的关键元件为轻质高阻尼球型脚,通过内部的力敏电阻器感受力的变化, 前端的传感器还包括 IMU 感受角速度和加速度来控制运动。
")
标签: 智能制造行业报告
相关文章
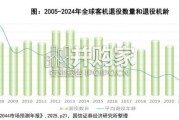
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 23 智能制造行业报告
DED 为金属 3D 打印的主流技术路线之一:金属 3D 打印主要技术路线为 PBF(粉末床熔融)和 DED(定向能量沉积)。 DED 属于利用聚焦热...
2026-05-06 44 智能制造行业报告

原始设计制造商(Original Design Manufacturer, ODM 是根据品牌厂商(如三星、 OPPO、小米等)的需求,为其研发、设计...
2026-05-06 28 智能制造行业报告

矿山机械全球千亿美元市场,主要包含采矿、选矿两大环节:根据 precedence research 数据,全球矿山机械市场空 间 1330.9 亿美元...
2026-05-04 33 智能制造行业报告
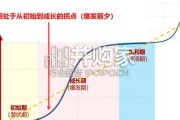
人形机器人的探索史可以追溯到20世纪60年代末,而迎来产业大爆发、受到业界和资本的广泛关注则仅是近几年的事。受益 于软件端大模型和硬件端零部件的发展和...
2026-04-30 85 智能制造行业报告

2021年至今的集运牛市来源于:疫情期间的极端供需错配、消费结构 扭曲、港口大面积拥堵以及后续的地缘政治冲突;周期高度由需求刺 激打开,地缘冲突增加供...
2026-04-28 42 智能制造行业报告
最新留言