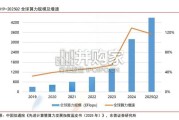
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 48 智能制造行业报告
数据是推动具身智能技术快速突破和落地应用的关键。借鉴自动驾驶汽车发展的路径,数据对于具身智能同样至关重要。优质的数据集能够驱 动智能体感知与理解环境,能够加速具身智能模型的训练与部署,帮助机器人有效完成复杂任务。不同于大语言模型可以使用互联网海量信息 作为训练数据,机器人所用的具身智能模型没有现成数据可以使用,需要投入大量时间和资源进行机器人操作实践或仿真模拟,以收集视觉、 触觉、力觉、运动轨迹以及机器人本体状态等多源异构数据。符合通用标准、得到验证的数据集成为具身智能行业的刚需。当前具身智能本体 形态多种多样,应用场景千差万别,对于具身智能训练数据的需求也更为多元。目前业内仍有部分数据集主要聚焦在特定机器人、特定场景和 特定技能等方面,在整体通用性上有待提升。因此,构建高质量、多样化的感知数据集是不可或缺的基础工作,这些数据集不仅为算法训练提 供了丰富的素材,也成为了评估具身性能的基准参考标准。 具身智能数据按采集方式主要分为真实数据和仿真数据两大类。(1)真实数据:真实数据是智能体通过自身物理身体上的各类传感器(如摄像 头、麦克风、触觉传感器等 ),在与真实物理环境进行交互过程中,实时采集获取的数据。真实数据主要来源有:机器人遥操(通过人工远程 操控获取真实场景下的操作数据)、动作捕捉(记录人类在特定环境中的行为模式)。(2)仿真数据:借助计算机模拟技术,在虚拟环境中生 成的、用于训练具身智能的数据。通过构建虚拟场景、物体和智能体,模拟智能体与虚拟环境的交互过程来产生数据。即利用仿真环境生成训 练数据。真实数据和仿真数据两者是互补关系,未来训练将大量混合使用真实数据和高质量的合成数据。 当前具身智能数据多为厂商自采集,存在丰富开源数据集。当前给人形机器人采集的高质量数据通常在现实世界中获取,采集方式主要有直接 接触数据(真机数据)和间接接触数据(人工控制数据)两种。最理想的数据采集方式是通过人形机器人本体直接触达物理世界,让其准确理 解真实环境。大规模真机数据的采集成本高昂,需要投入许多人力、物力和时间资源,数据标注和采集设备都存在门槛。目前市面上存在丰富 的高质量具身智能开源数据集,如智元、谷歌、国地共建中心等均开源了丰富的具身智能数据集,具备丰富的演示数量、场景任务和动作技能 等。
")
标签: 智能制造行业报告
相关文章
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 48 智能制造行业报告
“训练+推理”算力双轮驱动,未来全球算力需求呈指数级爆发。随着大模型快速迭代 与 AI 应用场景加速渗透,全球 AI 算力需求呈指数级爆发态势,算力基...
2026-05-17 31 智能制造行业报告
根据IDC最新报告指出,2025年全球人形机器人出货量接近1.8万台, YOY+508%,市场规模达到约4.4亿美元,主要应用于文娱商演、 科研教育、...
2026-05-17 44 智能制造行业报告

从宏观角度来看, 2020 年开始家用咖啡机市场需求增速加快,商用咖啡机市场需求放缓,原因如下:2010 -2020 年,资本进入商用咖啡机快速爆发,...
2026-05-14 40 智能制造行业报告
2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 29 智能制造行业报告
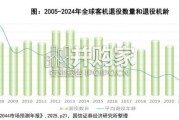
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 61 智能制造行业报告
最新留言