未来全球热管理市场空间广阔。根据 BCC Research《The Market for Thermal Management Technologie...
2025-01-15 113 智能制造行业报告
激光雷达:3D 环境建模使其成为核心传感器,但恶劣天气下性能下降、且无法识别图像及颜色是其短板。在自动驾驶不断进化的过程中,凭借独有的 3D 环境建模,激光雷达已经成为自动驾驶多传感器融合最核心的部分;在 L3 及以上自动驾驶传感器解决方案中,激光雷达至少需要 1 个。
毫米波雷达:全天候工作使其不可或缺,但分辨率低,同样难以成像。相比于激光雷达,毫米波雷达技术已经非常成熟,从上世纪 90 年代开始应用于自适应巡航,2012 年英飞凌推出 24GHz 单片雷达方案,陆续拓展到 ADAS 的各个功能模块,是现阶段的主力传感器,全球出货量早已超过千万级。
摄像头:自动驾驶的眼睛识别标识、物体,但无法点阵建模、远距测距。摄像头技术最为成熟,车载应用起步最早,在 ADAS 阶段作为绝对主流的视觉传感器,根据功能不同需要 4 个到 8 个摄像头,应用在车道监测、盲点监测、障碍物监测、交通标志识别、行人识别、疲劳驾驶监测、倒车影像、360 全景影像等等。
将是自动驾驶传感器的核心部分。首先,激光雷达提供生成环境的 3D 点云图像提供一系列的(x,y,z)坐标,与已有的高精度地图上的坐标进行对比,就可以很精确地做出车辆定位。同时在感知功能上,激光雷达点云图像比摄像头少了一步处理步骤(数字化),即摄像头图片需要进行数字化处理后才能由计算机进行判断物体类型等工作,而激光雷达生成的点云(实际是 TOF 数据)只需简单运算就可得到坐标数据,方便进一步的判断。")
激光雷达工作原理。激光雷达(LiDAR)能释放多束激光,接收物体反射信号,计算目标与自身的距离。应用较多的是利用反射信号的折返时间计算距离(Time ofFlight),也有连续波调频(CWFM)方法。与雷达和摄像头相比,激光雷达可以通过多束激光高频发射获取的反射数据形成周边物体的高清 3D 的“点云”图像。
相关文章
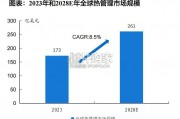
未来全球热管理市场空间广阔。根据 BCC Research《The Market for Thermal Management Technologie...
2025-01-15 113 智能制造行业报告

滑雪、滑冰场地数量增长。根据国家体育总局发布的《大众冰雪消费市场研究报告(2023-2024 冰雪季)》, 2023 年全国共用各类冰雪运动场地 28...
2025-01-09 58 智能制造行业报告

eVTOL商业化之路需要低空基础设施的持续完善和低空智慧空管网络的建设。 我们曾在低空经济深度报告《eVTOL 产业发展的 5 个核心问题》提出,eV...
2025-01-08 108 物流行业报告

2025 年全球机器视觉市场规模有望达千亿,全球市场集中度高。随着工业自动化技 术的不断发展,机器视觉在工业领域的应用越来越多,市场规模不断扩大。据...
2025-01-03 92 智能制造行业报告
市场普遍担忧:美国加关税会导致收入降速或下滑,中国在全球份额下降,关税成本增加或转嫁导致利润率下滑。 与市场共识不同,我们发现加关税对轻工出口企业收入...
2025-01-03 79 智能制造行业报告
最新留言