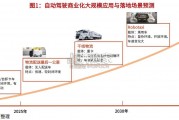
L4及以上高阶自动驾驶的商业化落地主要包括四大类型:1)港口/矿区(自卸卡车/集装箱卡车)、2)物流 配送最后一公里(配送车)、3)干线物流(重卡)、...
2025-01-14 178 汽车行业报告
自动驾驶已成为汽车行业发展的确定性趋势。自动驾驶最大的意义在于解放驾驶员的双手,带来人类空间意义首次的无缝连接,智能汽车使汽车的角色不再局限于交通工具,可以是移动的生活空间,通讯工具,娱乐平台等更富有想象力的定位。
自动驾驶使用的定位系统是以高精地图为依托,通过惯性传感器(IMU)和全球定位系统(GNSS),来定位车辆的位置。高精地图(HD MAP)为车辆环境感知提供辅助,提供超视距路况信息,并帮助车辆进行规划决策;惯导系统是不依赖于外部信息、使用惯性传感器来进行定位的自主式导航系统;全球定位系统是通过卫星信号定位,使用三角定位法定位地球表面或近地空间的任何地点的定位系统。
GNSS-RTK 技术的定位结果精度较高且稳定,目前已广泛应用于自动驾驶导航系统中, 但该方法也有比较明显的缺陷——依赖卫星信号。定位成功至少需三颗可见卫星,然而在实际的运行环境中,例如城市峡谷,由于多路径效应、卫星信号被遮挡等原因,会使可见星数目不足,这种情况将影响 GNSSRTK定位和测速的精确性以及其可靠性。
")
相关文章
L4及以上高阶自动驾驶的商业化落地主要包括四大类型:1)港口/矿区(自卸卡车/集装箱卡车)、2)物流 配送最后一公里(配送车)、3)干线物流(重卡)、...
2025-01-14 178 汽车行业报告

Spotify(SPOT.US):Spotify 是音乐流媒体领域的全球领导者,市场占有率约 30%。公司业务几乎覆盖全球市场,在拉丁美洲和其他地区的...
2025-01-14 122 TMT行业报告

根据弗若斯特沙利文的数据,2023 年按销售输出功率计,固定式发电(包括分布式发电和 离网电源)、乘用车和商用车各占全球燃料电池下游应用的 30%、2...
2025-01-13 87 汽车行业报告

短剧行业的发展历经了三个重要的阶段,在萌芽阶段(2018-2019年),长视频平台率先布局短剧领域,短视频平台也紧随其后开始涉足。这一时期,短剧作为一...
2025-01-09 69 TMT行业报告

广告市场需求与宏观经济环境高度相关,2019年,广告主对整体经济市场的信心波动致使中国广告市场重新进入调整期,新冠疫情 的爆发加剧了市场缩减的态势。2...
2025-01-06 56 TMT行业报告
最新留言