AI 算力需求爆发,驱动全球八大云服务提供商(CSP)资本开支进入高速增长通道。 TrendForce 数据显示,Google、AWS、Meta、Mi...
2026-05-15 19 电子行业报告
本文从信息链条和技术两个维度构建扫地机器人技术框架。我们从信息链条出发, 将扫地机器人运行流程视为信息输入、处理到输出的过程,并将技术解构为系统、 模块、硬件和软件四个层次,与信息链条各环节一一对应,从而构建起涵盖扫地 机器人各种功能原理与各类软硬件技术的分析框架(见图 1)。正如人类拥有感官感知周围环境,扫地机器人也拥有负责采集环境信息的感知系 统。感知系统是扫地机器人信息输入的受体,本质上是对周围物理环境的数字化, 更具体地说,是对家庭室内环境的数字化。从模块上看,主要包括测距、识别、 检测三个部分;从部件上看,主要包括传感器和边缘算法。1)测距与导航:扫地机器人导航需要进行定位与建图。通过测距,扫地机器人可 以实时获取周围物体与自身距离数据,在所处空间进行实时定位。此外,扫地机 器人通过移动弥补测距的范围限制,最大程度覆盖房间,利用距离数据确定房间 边界和各物体位置,最后完成建图。 2)测距与避障:避障的前提是确认障碍物,测距能够帮助扫地机器人进行物体识 别。当某物体上所有点(或者主要特征点)的距离数据能够被获取,便可形成该 物体的 3D 轮廓,结合算法等技术可对物体进行识别。 完成测距需结合测距工具与测距原理。
测距工具主要为各类传感器,根据物理属 性,可分为可见光传感器、不可见光传感器和声传感器等,常见的测距传感器包 括激光雷达、视觉相机等。测距原理主要分为几何测距和 ToF 测距两种方式。几 何测距是基于光的发射和折射所形成的几何数量关系计算距离(最常见的为三角 测距)。ToF 即 Time of flight,ToF 测距是基于光的飞行时间和光的飞行速度计算 距离,技术上可分为 dToF(direct)和 iToF(indirect)两种。按照智能水平的高低,扫地机器人识别可分为三个层次: 1)物体的存在判别:只能判别空间中是否存在物体,无法获取物体其他信息。 2)物体的种类区分:能够识别物体的形状、尺寸特征,从而判断物体的种类。如 科沃斯地宝系列配置 AIVI 人工智能和视觉识别系统,具备分类电线与拖鞋等日 常障碍并进行主动避障的能力,也可以智能识别地毯、窗帘、台阶等家居物品。 3)物体的信息获取:不仅能够识别物体的颜色、细分品种、质地等具体信息,还 可以提取丰富的语义信息。比如不仅识别出鞋子,还进一步识别出红色高跟鞋, 从而判断出室内可能存在女性。 随着清扫能力的完善,识别能力逐步成为行业竞争的主要领域。在扫地机器人发 展初期,识别能力的提升并不迫切。原因有两个方面,一是识别水平提升难度大 且对于清洁效果的边际改善较小,清扫过程中甚至不需要知道障碍物类型,只需 判断是否存在障碍物便可完成避障。只要具备识别常见清扫物体的能力便可满足 基本清扫需求;二是存在隐私保护问题,居家环境属于私密空间,扫地机器人识 别及分析能力过强可能引发消费者的怀疑和反感。不过,随着扫地机器人清洁能 力的逐步完善,识别能力也逐渐成为各大品牌差异化竞争的主要领域之一。
")
标签: 电子行业报告
相关文章

AI 算力需求爆发,驱动全球八大云服务提供商(CSP)资本开支进入高速增长通道。 TrendForce 数据显示,Google、AWS、Meta、Mi...
2026-05-15 19 电子行业报告
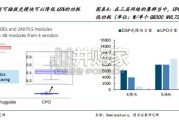
AI 发展带动训练集群规模扩大,推理端 token 消耗算力持续增长,带动算力和网络需求。我们认为,CPO 可以有效帮 助大规模集群降低功耗、提升互联...
2026-05-08 66 电子行业报告

ASIC 设计服务行业技术壁垒与规模效应构筑护城河,服务商价值在先 进制程下加速重估。1)技术端:先进制程复杂度确立服务商核心枢纽 地位。随着摩尔定律...
2026-05-06 25 电子行业报告

MLCC下游应用领域广泛,国产替代空间巨大。MLCC具有温度范围宽、电 容范围宽、介质损耗小、体积小、价格低等特点,广泛应用于移动终端、 高端装备、汽...
2026-05-05 29 电子行业报告

日系黑电:依靠垂直生产优势+彩色 CRT 技术革新登顶全球,平板时代战略失误逐步边缘化。1950s-1965 年起步期, 在通产省政策扶持下,企业从美...
2026-05-05 27 电子行业报告
晶圆代工赛道兼具高资本与生态壁垒,台积电的成功印证了生态-技术-产能-订单 的飞轮法则,本土 Fab 已经在生态、技术及产能有所铺垫,当前赢来多重催化...
2026-05-03 56 电子行业报告
最新留言