海内外催化共振落地,商业航天即将再次提速发展。2025年下半年开始,国内商业航天正式进入加速阶段,星网及垣信两大低轨卫星运营商进展不断,多家民营火箭完...
2026-05-14 17 航天通讯行业报告
全球卫星导航系统(GNSS)是能为地球表面或近地空间任何地点提供全天候定位、 导航、授时的空基无线电导航定位系统。美国的全球定位系统(GPS)、俄罗斯的 格洛纳斯卫星导航系统(GLONASS)、欧盟的伽利略卫星导航系统(Galileo)以 及我国的北斗卫星导航系统(BDS)是全球四大卫星导航定位系统。 受多路径效应、对流层折射等因素影响,普通 GNSS 单点定位精度一般在 5-10 米 (实际普通 GNSS 在开阔地带单频单模单点定位精度约为 2.5 米)。为提高卫星导 航系统的定位精度,出现了高精度卫星定位技术,主要包括以基于网络 RTK 技 术的连续运行参考站系统(CORS)为代表的地基增强技术、以美国广域增强系 统(WAAS)为代表的区域星基增强系统以及基于实时精密单点定位技术(PPP) 的商业全球星站差分增强技术。惯性导航系统(INS)属于推算导航方式,即从一已知点的位置根据连续测得的运 动体航向角和速度推算出其下一点的位置,因而可连续测出运动体的当前位置。 惯性导航系统的核心部件为陀螺仪和加速度计,利用载体先前的位置、惯性传感 器测量的加速度和角速度来确定其当前位置。给定初始条件,加速度经过一次积 分得到速度,经过二次积分得到位移。
角速度经过处理可以得出车辆的俯仰、偏 航、滚转等姿态信息,利用姿态信息可以把导航参数从载体坐标系变换到当地水 平坐标系中。惯性导航系统有自主导航、不受外部依赖、输出频率高(大于 100Hz)等优点。 定位精度取决于陀螺仪、加速度计等惯性传感器的测量精度,高性能 IMU 价格昂 贵。惯性导航定位误差会随着时间不断累积,导致位置和姿态的测量结果偏离实 际位置,因此无法用来做长时间的高精度定位。因此,通常采用惯性导航系统作 为 GNSS 信号丢失时的补偿,以使导航系统功能连续。惯性导航起源于军工领域,因其成本高,长期用于国防和商用航空航天领域,相 关模组器件主要由我国军工企业研发制造,产品以高精度战术级器件为主(包括 激光惯性导航、光纤惯性导航和高精度 MEMS 惯性导航)。但是,战术级惯性导 航模组器件一般价格昂贵,且与民用车辆所需的技术路线不同。MEMS 惯性导航 具有价格低、功耗低、体积小、可靠性高和环境适应能力强等特点,推动了惯性 导航在民用领域的发展。汽车电子电气架构正逐步由分布式 ECU 向域控制器、中央集中架构方向发展。高 精度定位模块在汽车中的搭载方案主要为以下两种:①高精度卫星定位模块挂接 到中央网关。高精度定位模块包括卫星定位信号接入、RTK 信息接入、IMU、融 合定位算法、高精度地图单元等。该方案需要将高精度定位及高精度地图信息通 过车内网络传输到自动驾驶域控制器,加大了时间延迟,降低了高精度定位的精 度。
")
标签: 航天通讯行业报告
相关文章
海内外催化共振落地,商业航天即将再次提速发展。2025年下半年开始,国内商业航天正式进入加速阶段,星网及垣信两大低轨卫星运营商进展不断,多家民营火箭完...
2026-05-14 17 航天通讯行业报告

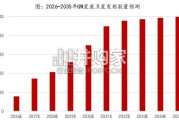
从目前环境上看,从 2019 年到 2025 年,全球火箭发射次数稳定提升,直观体现了全 球航天产业的蓬勃扩张。 除了当前全球各个国家和地区对航天产业...
2026-05-04 39 航天通讯行业报告
在经历了以 SpaceX 星链为代表的低地球轨道跑马圈地之后,全球商业航天有望开始向更低处进发。超低轨道, 这一曾被视为航天器禁区的轨道空间,正因材料...
2026-04-27 70 航天通讯行业报告

据Precedence Research报告,2024年全球火箭发射服务市场收入约186.8亿美元,预计2034年将增长至642.5亿 美元,年复合增...
2026-04-25 52 航天通讯行业报告
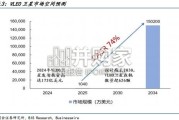
市场规模预测:全球 VLEO 卫星市场规模预计将从 2025 年的约 1,040 万美元激增至 2034 年的 15 亿美元以上,复合年增长率高达 7...
2026-04-14 69 航天通讯行业报告
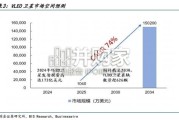
市场规模预测:全球 VLEO 卫星市场规模预计将从 2025 年的约 1,040 万美元激增至 2034 年的 15 亿美元以上,复合年增长率高达 7...
2026-04-10 98 航天通讯行业报告
最新留言