机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 38 智能制造行业报告
造成格局改变的最直接原因为国牌产品迭代创新更快。扫地机仍处于快速迭代创新的发展 的阶段,更快推出体验更好的产品往往能带来品牌份额的变化。扫地机器人产品经历了由 随机类(路线无规则)→局部规划(路线有规则)→全局规划(加入规划建图功能)→单 一功能基站款(自清洁或自集尘)→全能基站款(自动集尘+自清洁)的升级路径。 国牌全局规划式产品发展进程快于 iRobot。科沃斯 2013 年推出地宝 9 系,依靠激光 导航(Smart Navi 系统)实现全局规划,2017-2018 年全局规划类迎来量产窗口期, 产品收入占机器人业务比例由 3%提升至 39%;石头科技自 2016 年 9 月起销售产品全 为全局规划式(采用自研的基于激光雷达的 SLAM 技术),当年销量达 15.3 万台,而 iRobot 在 2015 年推出基于视觉导航(vSLAM)技术的 Roomba980。 国牌全能基站式产品发展进程明显快于 iRobot。2021 年 9 月科沃斯推出全能基站款 产品 X1 OMNI,随后 2022 年 3 月石头科技研发第一款全能基站产品 G10S,而至今 iRobot 并没有全能基站型产品。iRobot 产品分为扫地机器人(Roomba)和擦地机器 人(Braava), 2022 年 9 月新品 Roomba Combo j7+才首次采用扫拖一体(技术源于 与石头的技术互换),主要是对标 2021 年 3 月发布的国内版石头 T7S 以及 9 月同期 发布的海外版石头 S7 系列,但与石头等竞争对手不断推出的全基站新品 S8、Q 系列 相比,拖地解决方案较为初阶,基站依旧仅局限于单自动集尘功能,产品力已逐渐落 入下风,总体来看国牌相较于 iRobot 研发推新节奏更快。
")
标签: 智能制造行业报告
相关文章
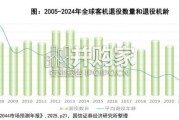
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 38 智能制造行业报告
DED 为金属 3D 打印的主流技术路线之一:金属 3D 打印主要技术路线为 PBF(粉末床熔融)和 DED(定向能量沉积)。 DED 属于利用聚焦热...
2026-05-06 47 智能制造行业报告

原始设计制造商(Original Design Manufacturer, ODM 是根据品牌厂商(如三星、 OPPO、小米等)的需求,为其研发、设计...
2026-05-06 31 智能制造行业报告

矿山机械全球千亿美元市场,主要包含采矿、选矿两大环节:根据 precedence research 数据,全球矿山机械市场空 间 1330.9 亿美元...
2026-05-04 34 智能制造行业报告
人形机器人的探索史可以追溯到20世纪60年代末,而迎来产业大爆发、受到业界和资本的广泛关注则仅是近几年的事。受益 于软件端大模型和硬件端零部件的发展和...
2026-04-30 87 智能制造行业报告

2021年至今的集运牛市来源于:疫情期间的极端供需错配、消费结构 扭曲、港口大面积拥堵以及后续的地缘政治冲突;周期高度由需求刺 激打开,地缘冲突增加供...
2026-04-28 45 智能制造行业报告
最新留言