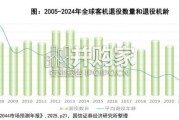
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 25 智能制造行业报告
人形机器人感知模块是运控与交互基础,遍布全身,未来成长空间广阔。人形机器人主流传感器包括,1)位觉传感器: 使用量1颗IMU,用来测量机器人的运动及姿态信息,一个价格400-2000元,未来或取消;2)视觉传感器:国内深度 相机+激光雷达,特斯拉为纯视觉方案,1个鱼目摄像头+2个普通摄像头;3)关节力控传感器:特斯拉每个线性关节在 电机外分别放置1个一维压力传感器;每个旋转关节在减速器外分别放置1个一维力矩传感器,国内方案不一。4)手腕 和脚踝传感器:每个手腕脚踝分别放1个六维力矩传感器(可选装),价格2-4万/个,但降价空间大。5)触觉传感器: 手部增加触觉传感器可提高灵巧手性能,多种技术路线布局;特斯拉直接使用10个触觉传感器。市场空间看,若2030年 人形机器人全球量产116万台,考虑特斯拉市占率65%,并考虑降价,则预期六维力矩传感器市场空间230亿>一维力矩 市场空间140亿>触觉传感器100亿。
六维力矩传感器壁垒高空间广,国产替代加速:主流技术为电阻应变式,其综合性能最优,精度高、技术成熟、测量范 围广,其中应变式中硅应变片为未来产业方向,其优势在于灵敏度高(高50-100倍),机械滞后小、体积小、耗电少 (温度稳定性有待提高)。六维目前空间小,22年国内销量不足5k台,生产壁垒高,包括结构解耦设计、贴片靠熟练技 术工、自研开发六维联合加载设备用于标定与检测。格局上看,海外老牌厂商多,多有较长历史,产品精度高,但价格 高昂,一般为4-5w/个;国内企业规模上小,龙一为宇立科技,预计份额50%,其余厂商坤维科技、鑫精诚、海伯森、 蓝点触控均已推出产品,同时东华测试、重庆鲁班机器人技术研究院、昊志机电、埃力智能等,也已初步具备六维力/力 矩传感器的生产能力,部分产品已开始送样测试。
触觉传感器多技术路线并行,追求极致性能,美企领先,中国企业未来可期。触觉传感器追求高灵敏度(多维力感知) 、高集成度(单位面积列阵单元多)、高延展性(耐用、高分辨率柔性材料)、成本低,以便获取物体信息,提升灵巧 手抓取的力和力矩的控制效果,对硬件、生产工艺、算法均要求高。目前多技术路线并行,短期看,压阻式传感器技术 难度低、成本可控,更多在中低端领域放量;而电容式及电磁式性能更优,抗干扰能力提升后,放量潜力大;视触觉传 感器理论上限高,随数据积累及大模型成熟,同时集成度提升后,未来潜力大。格局上,美企领先,但中国企业加速布 局,未来可期。
")
标签: 智能制造行业报告
相关文章
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 25 智能制造行业报告
DED 为金属 3D 打印的主流技术路线之一:金属 3D 打印主要技术路线为 PBF(粉末床熔融)和 DED(定向能量沉积)。 DED 属于利用聚焦热...
2026-05-06 44 智能制造行业报告

原始设计制造商(Original Design Manufacturer, ODM 是根据品牌厂商(如三星、 OPPO、小米等)的需求,为其研发、设计...
2026-05-06 28 智能制造行业报告

矿山机械全球千亿美元市场,主要包含采矿、选矿两大环节:根据 precedence research 数据,全球矿山机械市场空 间 1330.9 亿美元...
2026-05-04 33 智能制造行业报告
人形机器人的探索史可以追溯到20世纪60年代末,而迎来产业大爆发、受到业界和资本的广泛关注则仅是近几年的事。受益 于软件端大模型和硬件端零部件的发展和...
2026-04-30 85 智能制造行业报告

2021年至今的集运牛市来源于:疫情期间的极端供需错配、消费结构 扭曲、港口大面积拥堵以及后续的地缘政治冲突;周期高度由需求刺 激打开,地缘冲突增加供...
2026-04-28 42 智能制造行业报告
最新留言