磷化铟凭借超高电子迁移率与精准匹配通信窗口的直接带隙特性,有望 成为 1.6T 及 CPO 时代高速光芯片不可替代的物理基石。磷化铟(InP) 作为第...
2026-05-25 38 光电行业报告
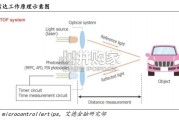
从感知路线类型可以分为纯视觉路线多传感器融合两种方式。纯视觉路线和多传感器融合路线,核心在于是否配置激 光雷达,是否需要激光雷达的高精度点云信息。纯视觉路线以特斯拉为代表,仅通过摄像头的视觉感知,实现对环境 的精准识别,目前国内也有部分主机厂开始尝试此方案;国内多数主机厂采用多传感器融合的技术路线,核心原因为 国内主机厂视觉算法研发经验较少,选择具备鲁棒性高、星系互补以及系统冗余的多传感器方案,更有利于实现全场 景的 NOA 功能。激光雷达是摄像头、毫米波雷达与超声波雷达的有效补充。激光雷达的环境感知精度高,激光雷达发射的光波频率比 微波高出 2-3 个数量级,具有极高的距离分辨率、角分辨率和速度分辨率。激光雷达可直接获取目标的距离、角度、 反射强度、速度等信息,生成目标的三维图像。激光雷达抗干扰能力较强,可弥补摄像头在强光或黑夜等场景下性能 劣化的缺陷以及微波雷达对金属物体敏感在人车混杂的场景中不易识别出行人的缺陷。
")
标签: 光电行业报告
相关文章
磷化铟凭借超高电子迁移率与精准匹配通信窗口的直接带隙特性,有望 成为 1.6T 及 CPO 时代高速光芯片不可替代的物理基石。磷化铟(InP) 作为第...
2026-05-25 38 光电行业报告

光模块是光通信中实现光电转换和电光转换的核心器件,通常由光发射组件(TOSA)、光接收组件(ROSA)、驱动电路、光接口等封装而成。 在光通信系统中,...
2026-05-20 53 光电行业报告
高带宽、低延时和高密度是数通市场对光模块的核心需求,需求持续加速放量。光模块速率以 400G/800G 为 主,并向 1.6T 演进,并且受到AI 算...
2026-04-22 99 光电行业报告
激光雷达加速向“混合固态/纯固态”切换,车规与降本是主驱动 力:机械式因寿命、体积、可靠性难满足车规而边缘化;混合固 态成为乘用车进阶辅助驾驶系统(A...
2026-03-20 46 光电行业报告
ADAS 激光雷达市场发展重心从“下沉化”向“高端化”倾斜,“情绪价值主导+高成本敏感性”有望向“安全价值主 导+低成本敏感性”转向。当前 ADAS...
2026-01-12 65 光电行业报告
谷歌 Gemini 3 大模型验证了 Scaling Law 的有效性,云厂商受益 于 AI对核心业务的推动。Scaling Law 揭示了模型性能与...
2026-01-02 120 光电行业报告
最新留言