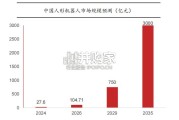
灵巧手或为人形机器人多代际更迭最受益环节。机器类人化发展契合现实世界需求, 2025 年进入人形机器人量产元年,且行业需求有望高增。参照中商产业研究院...
2025-04-18 16 智能制造行业报告
灵巧手是机器人操作和动作执行的末端工具,在机器人学领域属于末端执行器的范畴。从 运动学的观点看,灵巧手需满足两个条件:指关节运动时能使物体产生任意运动、指关节 固定时能完全限制物体的运动,按照运动学理论,满足上述条件至少要 3 个手指和 9 个自 由度。因此,我们定义灵巧手是指数≥3,自由度≥9 的末端执行器。例如日本的 TWENDY-ONE 机器人,其灵巧手拥有 4 根手指和 13 个自由度。两指夹持器通过模仿手指的夹持运动来抓持物体,能够在执行动作的同时夹住和松开目标 物体。其优点是结构简单,运动形式稳定,工作可靠,在工业现场常应用于目标零部件的 夹取、搬运、换位、装配等。但由于缺乏手指的灵活性,不能对复杂形状的目标进行抓持, 无法对目标物体实施操作。该类夹持器已有多种标准化的产品,例如德国 SCHUNK 公司的 气动平行爪夹持器、FESTO 公司的气动夹持器等。
多关节手指抓持手在其手指上设置多个关节,具有对目标物体进行仿形接触和抓持的 可能性,扩大了抓持范围,能够提高抓持的稳定性和可靠性。 软体多指抓持手在抓取物体时可根据物体形状更自然妥帖地调整形态,在操作易碎品 或不规则物体(如鸡蛋、蔬果、个性化零件等)方面具有优势。美国研制了用于国际空间站舱外作业的宇航员灵巧手 Robonaut hand,由 1 个手 腕和 5 个手指组成,共 14 个自由度,由于使用了腱绳张力传感器,整手的运动 控制更加准确。 德国宇航中心先后研制成功了 DLR-Ⅰ和 DLR-Ⅱ灵巧手,共集成了 25 个传感器, 包括类似人工皮肤的触觉传感器、关节扭矩传感器、位置传感器和温度传感器 等,灵巧手在灵活性和感知能力方面有显著提升。 3) 意大利 IIT 研制的 iCub 灵巧手集成了 12 个触觉传感器,48 个压力传感器和 17 个位置传感器以实现灵巧的操作和丰富的感知能力,系统集成度的提高和感知 能力的丰富使得多指手在操作时更加灵巧。
")
标签: 智能制造行业报告
相关文章
灵巧手或为人形机器人多代际更迭最受益环节。机器类人化发展契合现实世界需求, 2025 年进入人形机器人量产元年,且行业需求有望高增。参照中商产业研究院...
2025-04-18 16 智能制造行业报告

产品供应链重合度高,车端降本经验有望复用于具身智能。目前人形机器人与汽车的部分零部件具备一定技术相通性,二者在感知端的视觉、决 策端的芯片以及执行端的...
2025-04-18 12 智能制造行业报告
2025年将有望成为低空经济从前期规划转向产业落地的元年。前期各地建设的试验场将逐渐投入使用,低空司将解决行业标准统一、技术 发展方向、管理机制协同等...
2025-04-17 28 智能制造行业报告
人形机器人又称仿生机器人,一般认为人形机器人是一种模仿人类外形的机器人,除具备人形和模拟人类动作外还兼具智慧化和可交互性等特点,包含三 大核心技术模块...
2025-04-14 53 智能制造行业报告

人形机器人传感器是什么? 传感器是机器人感知物理世界的窗口,也是机器人迈向智能化的基础。包含各类视觉传感器、听觉传感器、触觉传 感器、力传感器等,用于...
2025-04-13 33 智能制造行业报告

最新留言