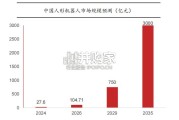
灵巧手或为人形机器人多代际更迭最受益环节。机器类人化发展契合现实世界需求, 2025 年进入人形机器人量产元年,且行业需求有望高增。参照中商产业研究院...
2025-04-18 16 智能制造行业报告
20世纪80年代:20世纪80年代是灵巧手发展的一个里程碑,取得了许多成果,产生了具备了位置、力/力矩等基本传 感功能的现代灵巧手。1983年美国的Stanford/JPL灵巧手有3个手指,每指有3个自由度,采用12个直流伺服电机作为 关节驱动器,采用N+1型腱驱动系统传递运动和动力。Utah/MIT灵巧手有4个手指,每个手指有4个自由度,共16个 自由度,采用2N型腱驱动系统传递运动和动力。20世纪90年代:随着嵌入式硬件的发展,多指灵巧手的研究向着高系统集成度和丰富的感知能力提升的方向发展。 20世纪90年代研制的典型灵巧手有DLR I灵巧手和NASA多指灵巧手,这些灵巧手在构型方面有所提高,能够根据抓 取操作的需要进行灵巧手构型,感知能力也更加丰富。电机驱动为主流,特斯拉灵巧手采用空心杯电机:驱动源(如电机)为灵巧手的活动提供动力,是影响灵巧手体积 重量的重要因素。电机驱动是目前多指灵巧手的主流驱动方式,其关键问题是如何减小电机的尺寸。特斯拉Optimus 和优必选Walker的灵巧手都是电机驱动,特斯拉灵巧手为减小电机尺寸而使用空心杯电机。
:灵巧手、空心杯电机(37页)")
标签: 智能制造行业报告
相关文章
灵巧手或为人形机器人多代际更迭最受益环节。机器类人化发展契合现实世界需求, 2025 年进入人形机器人量产元年,且行业需求有望高增。参照中商产业研究院...
2025-04-18 16 智能制造行业报告

产品供应链重合度高,车端降本经验有望复用于具身智能。目前人形机器人与汽车的部分零部件具备一定技术相通性,二者在感知端的视觉、决 策端的芯片以及执行端的...
2025-04-18 13 智能制造行业报告
2025年将有望成为低空经济从前期规划转向产业落地的元年。前期各地建设的试验场将逐渐投入使用,低空司将解决行业标准统一、技术 发展方向、管理机制协同等...
2025-04-17 29 智能制造行业报告
人形机器人又称仿生机器人,一般认为人形机器人是一种模仿人类外形的机器人,除具备人形和模拟人类动作外还兼具智慧化和可交互性等特点,包含三 大核心技术模块...
2025-04-14 55 智能制造行业报告

人形机器人传感器是什么? 传感器是机器人感知物理世界的窗口,也是机器人迈向智能化的基础。包含各类视觉传感器、听觉传感器、触觉传 感器、力传感器等,用于...
2025-04-13 35 智能制造行业报告

最新留言