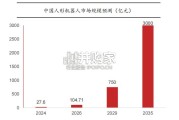
灵巧手或为人形机器人多代际更迭最受益环节。机器类人化发展契合现实世界需求, 2025 年进入人形机器人量产元年,且行业需求有望高增。参照中商产业研究院...
2025-04-18 29 智能制造行业报告
可穿戴式肌电仿生假肢手的控制与反馈机制与人形机器人五指灵巧手高度相符。整体模 块可以分为下行控制通路和上行反馈通路两部分。下行控制通路将残肢肌肉的肌电信号 进行采集后,输入假肢控制器中的运动控制算法内生成电极控制指令以驱动假肢手指运 动。上行反馈通路将假肢手指尖的力、振动等传感器信息通过特征提取算法输入触觉反 馈映射算法中,算法输出触觉刺激装置的驱动指令向使用者提供触觉反馈信息。假肢手的发展历程按照功能性可以分为几个阶段:装饰型假肢手、身体驱动型假肢手和主动型假肢手。装饰型假肢手起源最早,但缺乏功能性;身体驱动型假肢 手固定在人体躯干部,通过线缆进行控制,能显著提高截肢患者的日常生活质量,但只能完成简单的动作,且占用注意力和体力;主动型假肢手使用电机作为动 力源以减少使用者的负担,不仅更加美观,还具有更高的自由度。一方面能更加智能地完成运动任务,另一方面还能根据传感信息提供触觉反馈。主动型仿生假肢手通常使用佩戴者的生理信号作为控制信号的来源。根据采集传感器侵入性的不同可以分为侵入式和非侵入式两种。侵入式假肢手使用植入中枢神经系统或 外周神经系统中的电极作为信号采集装置。 事实上目前市售的绝大多数主动型假肢手多使用的是非侵入式控制信号。而其中使用最多的是表面肌电(Surface electromyograph,sEMG)信号。sEMG信号产生于被神 经元所激活的骨骼肌,并从肌肉外的皮肤表面使用电极进行采集。信号包含了神经元发出的运动控制信息,能直接反映人的运动意图。另一种检测肌肉活动的方法是基于肌 动信号(Mechanomyography,简称MMG)发生的,它可以测出肌肉收缩过程中的机械信号。机械信号是肌肉收缩时产生的低频振动或声音形式的机械振动,因此可通过 机械振动来反映肌肉活动。通常检测MMG的设备有加速度计、声音传感器以及电容传感器等。
")
标签: 智能制造行业报告
相关文章
灵巧手或为人形机器人多代际更迭最受益环节。机器类人化发展契合现实世界需求, 2025 年进入人形机器人量产元年,且行业需求有望高增。参照中商产业研究院...
2025-04-18 29 智能制造行业报告

产品供应链重合度高,车端降本经验有望复用于具身智能。目前人形机器人与汽车的部分零部件具备一定技术相通性,二者在感知端的视觉、决 策端的芯片以及执行端的...
2025-04-18 26 智能制造行业报告
2025年将有望成为低空经济从前期规划转向产业落地的元年。前期各地建设的试验场将逐渐投入使用,低空司将解决行业标准统一、技术 发展方向、管理机制协同等...
2025-04-17 42 智能制造行业报告
人形机器人又称仿生机器人,一般认为人形机器人是一种模仿人类外形的机器人,除具备人形和模拟人类动作外还兼具智慧化和可交互性等特点,包含三 大核心技术模块...
2025-04-14 57 智能制造行业报告

人形机器人传感器是什么? 传感器是机器人感知物理世界的窗口,也是机器人迈向智能化的基础。包含各类视觉传感器、听觉传感器、触觉传 感器、力传感器等,用于...
2025-04-13 37 智能制造行业报告

最新留言