高带宽、低延时和高密度是数通市场对光模块的核心需求,需求持续加速放量。光模块速率以 400G/800G 为 主,并向 1.6T 演进,并且受到AI 算...
2026-04-22 72 光电行业报告
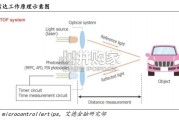
美国汽车工程师学会(SAE)将智能驾驶的发展按驾驶控制权的归属分为六个阶段:L0-L2 为较 低阶辅助驾驶阶段,由驾驶员主导、系统辅助完成;L3-L5 为高阶智能驾驶阶段,驾驶决策责任 方逐步由驾驶员过度到系统。 智能驾驶按技术架构分为感知、决策和执行三个层次。感知层是汽车的“眼睛”,主要负责对环 境信息和车内信息的采集与处理;决策层是汽车的“大脑”,依据感知信息来进行驾驶决策判断; 执行层相当于汽车的“四肢”,按照决策结果对车辆进行控制。这其中,感知层是实现智能驾驶 的基础和前提,在信息传输上归纳为三个层面:1、物理信息,包括姿态、速度、形状、温度、 能耗等;2、语义信息,辨别物体的类别;3、行为预测,预测物体的行为。 智能传感器是感知层的硬件核心。感知层通过传感器实现对信息的感知,根据作用机理不同分 为传统传感器和智能传感器,前者主要负责车辆对自身状态的感知,安装在动力总成、底盘系统等汽车关键部位,该类传感器多以 MEMS 工艺生产,具有低成本、高可靠性、小体积等优势。
后者负责从车辆外界获取信息,是智能驾驶感知层的硬件核心,主要包括车载摄像头、毫米波 雷达、激光雷达、超声波雷达四大类别的硬件传感,具备两个显著特征:1)量少价高,与传统 传感器相比,智能传感器数量少且价格高,基本都在百元以上,占据了汽车传感器总成本的绝 大部分;2)量随级升,随着汽车 SAE 等级提升,为了提高感知冗余,所需配备的智能传感器数 量随之增多。智能驾驶需要传感器满足成本、可靠性、距离、精度等不同维度的需求,由于各类传感器互有优 劣,难以替代,因此多传感器融合已成为大势所趋。要实现高级别的智能驾驶,仅靠不同传感器 之间简单的堆叠和并列是远远不够的,通过主次分明、有机统一的传感器融合方案,激发核心 传感器之间的“化学反应”,实现更优异的感知表现,并使辅助传感器对系统整体能力做到恰到 好处的补充,才是打造智能驾驶车辆感知系统的必要之举。目前对于智能驾驶的感知层融合配 置,市场上主要有两大技术流派: 一类是“摄像头主导”方案,感知系统由摄像头主导+毫米波雷达组成,轻感知重算法,以 特斯拉为典型代表; 另一类是“激光雷达主导”方案,感知系统由激光雷达主导+摄像头+毫米波雷达组成,重 感知轻算法,以 Waymo、百度等无人驾驶型企业和蔚来、小鹏、理想等造车新势力为典型 代表。
")
标签: 光电行业报告
相关文章
高带宽、低延时和高密度是数通市场对光模块的核心需求,需求持续加速放量。光模块速率以 400G/800G 为 主,并向 1.6T 演进,并且受到AI 算...
2026-04-22 72 光电行业报告
激光雷达加速向“混合固态/纯固态”切换,车规与降本是主驱动 力:机械式因寿命、体积、可靠性难满足车规而边缘化;混合固 态成为乘用车进阶辅助驾驶系统(A...
2026-03-20 43 光电行业报告
ADAS 激光雷达市场发展重心从“下沉化”向“高端化”倾斜,“情绪价值主导+高成本敏感性”有望向“安全价值主 导+低成本敏感性”转向。当前 ADAS...
2026-01-12 64 光电行业报告
谷歌 Gemini 3 大模型验证了 Scaling Law 的有效性,云厂商受益 于 AI对核心业务的推动。Scaling Law 揭示了模型性能与...
2026-01-02 105 光电行业报告

近年来,海外主要云厂商均大幅上调其 AI 基础设施投资计划,为光模块供应商提供了空前 的利好。美国四大云厂商(谷歌/微软/Meta/亚马逊)在 202...
2026-01-01 117 光电行业报告

硅光子技術是指通過成熟的硅基工藝將光子器件與電子元 件集成在同一晶片上,利用光信號替代傳統銅導線進行數 據傳輸,是一種顛覆性的光通信解決方案。 光電協...
2025-12-30 86 光电行业报告
最新留言