结合前不久我们团队在硅谷调研的见闻,我们认为 Optimus 第一阶段的商业化,不一定是“完全自主替代人”,而更可能是 一种“干中学”的过渡,将“劳动...
2026-05-21 10 智能制造行业报告
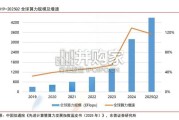
在 2014 年以前的技术萌芽阶段(2000 年以前,图中因数据过于集中而未示出) 和缓慢发展阶段(2000 年-2014 年),专利申请人及专利申请量较少,主要是部分 日本企业较早进入该赛道,例如:丰田、本田等,在此阶段专利集中度较高,但随 着申请人数的增加而降低,各年人均专利申请量从 2003 年前后的峰值 11 件左右下 降到 2014 年前后的 4 件左右。 从 2015 年开始的快速发展阶段(2015 年-2017 年),众多新专利申请人涌入 该赛道,尤其是来自中国的申请人,例如优必选科技、达闼、清华大学、北京理工 大学等;随之而来的是专利申请量的快速增加,2015 年人均申请人达 5.3 件,2016年和 2017 年因申请人数持续增加而稀释至 4 件左右。 在 2018 年以来稳定发展阶段竞争逐渐白热化,专利申请量进一步增长并维持 在高位,而申请人数出现下降。在该阶段,专利申请人的平均年申请量稳定在 4 件 左右。 此外,受专利公开滞后因素影响,从 2021 年开始专利申请量和申请人数看似 下降,但实际申请人数和申请量可能多于上图已公开数据,结合近几年发展趋势, 预计未来几年人形机器人技术领域的发展速度放缓,申请人持续减少但专利申请量 仍将保持在高位,人均专利申请量提升,说明头部竞争者的专利垄断地位加强,即 预示着该技术将逐渐进入成熟期。在人形机器人技术领域,中国的专利集中度自 2000 年来整体呈下降趋势,并 在 2014 年后在 20%-30%间波动。目前中国的专利集中度较低,虽然近年前三申请 人占比有小幅度回升,考虑到中国的申请人数量多,可以推知,中国在该领域的竞 争非常激烈,暂未出现垄断态势。 日本的专利集中度在 80%左右波动,因此,目前日本的专利集中度较高。考虑 到日本的申请人数量不多,且波动量并不大,可以推知,日本在该领域的竞争并不 激烈,但在其国内已形成垄断的态势。
")
标签: 智能制造行业报告
相关文章

结合前不久我们团队在硅谷调研的见闻,我们认为 Optimus 第一阶段的商业化,不一定是“完全自主替代人”,而更可能是 一种“干中学”的过渡,将“劳动...
2026-05-21 10 智能制造行业报告
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 58 智能制造行业报告
“训练+推理”算力双轮驱动,未来全球算力需求呈指数级爆发。随着大模型快速迭代 与 AI 应用场景加速渗透,全球 AI 算力需求呈指数级爆发态势,算力基...
2026-05-17 36 智能制造行业报告
根据IDC最新报告指出,2025年全球人形机器人出货量接近1.8万台, YOY+508%,市场规模达到约4.4亿美元,主要应用于文娱商演、 科研教育、...
2026-05-17 50 智能制造行业报告

从宏观角度来看, 2020 年开始家用咖啡机市场需求增速加快,商用咖啡机市场需求放缓,原因如下:2010 -2020 年,资本进入商用咖啡机快速爆发,...
2026-05-14 44 智能制造行业报告
2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 30 智能制造行业报告
最新留言