2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 21 智能制造行业报告
传感器:人形机器人感知交互基础,重视技术路线变化及产业进展。人形机器人传感器主要分布于传感系统,常见的类型包括视觉、触觉、听觉传 感器,嗅觉和味觉传感器可能在人形机器人特定应用场景中应用。目前六维力传感器、激光雷达、柔性电子皮肤、高性能惯性测量单元(IMU)及力 控扭矩传感器等在该领域具有较高的技术价值和市场潜力。我们按照不同功能,将人形机器人的传感器分为视觉听觉、力及触觉、编码器及惯性。据 CSDN,2030年人形机器人的零部件价值量,力传感器+IMU占比达到13%。各类传感器中,力及力矩传感器价值链占比较大。 多类型传感器:力及触觉传感器高价值量,国内企业进展加速;其他环节老玩家的新进展。1)视觉及听觉传感器:在人形机器人领域,3D视觉感 知技术可以让机器人获得更加准确的外部环境信息,降低误差,帮助机器人快速地进行各种动作反应。听觉领域,多采用麦克风阵列,麦克风阵列常 采用多个麦克风分布在三维空间,对空间中信号的不同方向和方位的立体感知能力有所提升。2)力/力觉及触觉传感器:力/力矩传感器价值量较大 ,且六维力传感器技术壁垒较高,目前ATI占据了最高的市场份额。国内企业如宇立仪器、坤维科技、蓝点触控等正在积极开拓六维力传感器市场。 电子皮肤领域,处于发展提速的阶段,难度较大且与其他传感器的交互存在较高壁垒。皮肤及灵巧手终端的触觉,将一直是技术及产业迭代的主要方 向。3)惯性传感器:国内IMU行业玩家相对固定,且IMU结构相对成熟,目前机器人企业的IMU方案仍存在不确定性,建议此环节持续关注老玩家 的新进展,以及关注机器人企业的IMU方案进展。
")
标签: 智能制造行业报告
相关文章
2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 21 智能制造行业报告
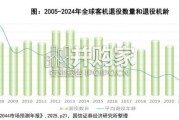
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 46 智能制造行业报告
DED 为金属 3D 打印的主流技术路线之一:金属 3D 打印主要技术路线为 PBF(粉末床熔融)和 DED(定向能量沉积)。 DED 属于利用聚焦热...
2026-05-06 50 智能制造行业报告

原始设计制造商(Original Design Manufacturer, ODM 是根据品牌厂商(如三星、 OPPO、小米等)的需求,为其研发、设计...
2026-05-06 37 智能制造行业报告

矿山机械全球千亿美元市场,主要包含采矿、选矿两大环节:根据 precedence research 数据,全球矿山机械市场空 间 1330.9 亿美元...
2026-05-04 35 智能制造行业报告
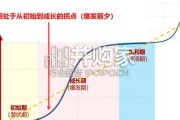
人形机器人的探索史可以追溯到20世纪60年代末,而迎来产业大爆发、受到业界和资本的广泛关注则仅是近几年的事。受益 于软件端大模型和硬件端零部件的发展和...
2026-04-30 93 智能制造行业报告
最新留言