相比新车质量评价体系中的其他维度,中国消费者遇到产品质量问题/抱怨 最多的维度是“行驶过程”,其次是“电子设备”及“内饰”, 而遇到问题最少的则是“座...
2025-04-16 44 汽车行业报告
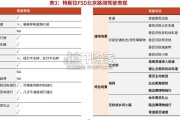
我们认为传统车厂在向 L2 以上更高级别的 ADAS 功能迭代过程中,仍然多采用“叠罗汉” 模式,即保留分布式架构的冗余,额外追加域控制器或高算力模块来实现 L3 及以上功能, 带来处理器需求的线性增长。举例来看,在全球第一款实现 L3 功能的 2017 款 A8 轿车中, 奥迪并没有采用集中式架构,而是在分布式架构基础上追加了一颗 zFAS 域控制器对超声波 雷达、环视摄像头、激光雷达实况数据做统筹处理(图 13),其中包含了 Nvidia Tegra K1 套 件(处理器为一颗 GPU)、MobilEye EyeQ3、Altera Cyclone FPGA 以及 Infineon Aurix MCU, 直接将单车处理器用量提升 4 颗,价值量提升数倍。宝马同样通过增加额外的传感器系统 与高端微处理器来满足自动驾驶性能要求提升;对 Level 3 车型,宝马选择在平台中整合两 颗 Mobileye EyeQ5 芯片,两个 Intel Denverton CPU 和一个额外的 Infineon Aurix MCU。
在上文中我们提到,L3 及以上 ADAS 各个功能的实现会带来单车感知模组数量大幅提升, 对于芯片识别、预测及执行的要求也更高。我们认为,分布式架构下芯片冗余问题严重, 排线过于复杂,难以实现更高级别的自动驾驶;而集中式架构具有提升算力,减少排线等 诸多优点。因此,我们认为尽管目前传统车厂大多数仍以硬件“叠罗汉”方式实现 L3 级 ADAS 功能,但这很难成为长期趋势。 新能源车企带动 ADAS 硬件架构革新,简化 MCU,增加配备高算力 MPU(AI SoC)的域控 制器来实现多传感器融合有望成为 L3+ ADAS 硬件的主流结构。以 Tesla 的自动驾驶平台 Autopilot 为例,在 2.0 版本时代,Tesla 便抛弃了分布式架构,而演化到 3.0 版本时,我们 看到 1)中央超级计算机由 ADAS 板+信息娱乐板组成,在 ADAS 板上,Tesla 采用了两颗自 研的 SoC 替代 Nvidia GPU + SoC,并保留一颗冗余 MCU。此外,在整个超级计算机中仅有信 息娱乐板上使用了一颗 MCU(NXP 提供),相比第一代产品 MCU 数量减少,自研芯片占比 大幅上升;2)在视觉和雷达模块上,Tesla 的三摄方案只保留了感知的基础能力,边缘 MCU 数量下降明显。
")
标签: 汽车行业报告
相关文章

相比新车质量评价体系中的其他维度,中国消费者遇到产品质量问题/抱怨 最多的维度是“行驶过程”,其次是“电子设备”及“内饰”, 而遇到问题最少的则是“座...
2025-04-16 44 汽车行业报告

全地形车制造属性强,产能围绕消费市场布局。全地形车在销售前需要经过生产 和组装两个环节,以 Polaris 为例,全地形车核心零部件(发动机、车架、轮...
2025-04-15 46 汽车行业报告
特斯拉FSD入华,中美差异+监管制约导致FSD本地化不足:2/25特斯拉中国官方发布2024.45.32.12 软件更新、并开启分批次推送。我们针对特...
2025-04-11 46 汽车行业报告

新能源车重量和智能驾驶对 EPS 升级提出了更高的要求。EPS 的核心参数中,传动比 和齿条力是重点影响性能的关键因素。电动化:电动汽车的普及使得车辆...
2025-04-10 36 汽车行业报告
2025年有望成为国内L3上车元年。2024年12月,特斯拉发布FSD V13.2更新,实现“从停车位到停车位”的端到端驾驶模式 。目前国内鸿蒙智行、...
2025-04-03 88 汽车行业报告

打造爆款车的策略有两种:对标跟进和差异化领先,而不同时代的红利下同一竞争 策略也有不同之处,我们应当结合时代红利+竞争阶段采取对应的爆款车打造策略。...
2025-03-31 80 汽车行业报告
最新留言