空心杯电机是灵巧手的优选电机方案,是一种无铁芯转子结构的直流电机,与传统直流电机相比,省去铁芯支撑结构,其转子或定子由空心杯状的 线圈绕组、连接板和主...
2025-04-20 10 智能制造行业报告
根据汤森路透的数据,公司2012年收入已达到千万美金规模,2018年10月-2019年10月, 公司收入2456万美元,较2013年增长近一倍。 以前沿机器人为主要产品的Endeavor Robotics、 Energid Technologies收入量级仅为5-6 百万美元级别,远低于波士顿动力(crunchbase)波士顿动力成立于1992年,起初以为美国防部开发四轮BigDog而闻名,后转型民用机器 人领域,以BigDog为蓝本开发各类型民用机器人。 产品目前覆盖四轮(足)、两轮(足)、仿人等类型机器人。公司目前专注研发SPOT 、HANDLE 、PICK、ATLAS共四大机器人,分别用于移动探 测、物流、工业平台、仿人四类场景。目前SPOT、PICK已经开启商用(AVAILABLE),HANDLE计划在未来两年内上市销售。
2019年4月,波士顿动力收购初创公司Kinema Systems,该公司利用基于深度学习的 3D 视觉技术,为搬运用机械臂所需的定位、搬运操作等提供辅助。 Kinema在被收购前已经发布了用于工业机器人的深度学习 3D 视觉系统Pick,handle机器 人已装备这项技术 。通过收购,波士顿动力希望加强视觉学习,并进军物流行业。
")
标签: 智能制造行业报告
相关文章
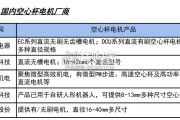
空心杯电机是灵巧手的优选电机方案,是一种无铁芯转子结构的直流电机,与传统直流电机相比,省去铁芯支撑结构,其转子或定子由空心杯状的 线圈绕组、连接板和主...
2025-04-20 10 智能制造行业报告
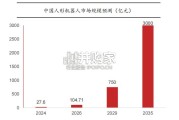
灵巧手或为人形机器人多代际更迭最受益环节。机器类人化发展契合现实世界需求, 2025 年进入人形机器人量产元年,且行业需求有望高增。参照中商产业研究院...
2025-04-18 33 智能制造行业报告

产品供应链重合度高,车端降本经验有望复用于具身智能。目前人形机器人与汽车的部分零部件具备一定技术相通性,二者在感知端的视觉、决 策端的芯片以及执行端的...
2025-04-18 28 智能制造行业报告
2025年将有望成为低空经济从前期规划转向产业落地的元年。前期各地建设的试验场将逐渐投入使用,低空司将解决行业标准统一、技术 发展方向、管理机制协同等...
2025-04-17 48 智能制造行业报告
人形机器人又称仿生机器人,一般认为人形机器人是一种模仿人类外形的机器人,除具备人形和模拟人类动作外还兼具智慧化和可交互性等特点,包含三 大核心技术模块...
2025-04-14 58 智能制造行业报告

人形机器人传感器是什么? 传感器是机器人感知物理世界的窗口,也是机器人迈向智能化的基础。包含各类视觉传感器、听觉传感器、触觉传 感器、力传感器等,用于...
2025-04-13 38 智能制造行业报告
最新留言