从目前环境上看,从 2019 年到 2025 年,全球火箭发射次数稳定提升,直观体现了全 球航天产业的蓬勃扩张。 除了当前全球各个国家和地区对航天产业...
2026-05-04 36 航天通讯行业报告
由于IMU提供的是一个相对的定位信息,它的作用是测量相对于起点物体所运动的路线,所以它并不能提供你所在的具体位置的信息。因此, IMU常常和GNSS一起使用,当在某些卫星信号微弱的地方,IMU可以让汽车继续获得绝对位置的信息,不至于“迷路”。具体来说,IMU与GNSS的结合有两大核心优势:(1)IMU可以验证RTK GNSS结果的自洽性,并对无法自洽的绝对定位数据进行滤波和修 正;(2)IMU可以在RTK GNSS信号消失之后,仍然提供持续若干秒的亚米级定位精度,为自动驾驶汽车争取宝贵的异常处理的时间。从组合的实现方式上,卫惯组合系统主要分为如下几种——松耦合组合、紧耦合组合和深耦合组合,算法难度依次递增: 松耦合:松耦合采用的是RTK定位结果+IMU原始数据来实现融合,在隧道、地下车库等完全无卫星信号的场景下与紧耦合、深耦合相当,但 在有卫星信号但是信号被遮挡的场景下,如城市峡谷等,定位效果不如紧耦合、深耦合。
从组合的实现方式上,卫惯组合系统主要分为如下几种——松耦合组合、紧耦合组合和深耦合组合,算法难度依次递增: 紧耦合:紧耦合采用RTK定位结果+GNSS的原始数据+IMU原始数据。可以有效利用信号遮挡环境下的卫星观测数据,提升定位效果。紧耦 合算法的实现需要厂家同时具备RTK定位算法和组合导航算法两种研发能力。然而紧耦合算法在GNSS原始数据质量较差时,仍然无法达到 最佳效果。实际上,在林荫、楼宇遮挡等恶劣环境下,GNSS容易出现频繁失锁、观测量跳变等异常现象,容易引发定位异常。深耦合:深耦合算法在紧耦合算法的基础上,利用 IMU原始数据辅助GNSS信号捕获跟踪,通过IMU准 确的相对多普勒变化信息辅助载波跟踪环路,提高 恶劣环境下多普勒估计准确度,从而提高恶劣环境 下载波相位、伪距等观测量的精度和连续性,减少 观测量中断和跳变,从而有效提高组合导航精度和 可靠性。另外,利用深耦合算法还可以有效检测出 欺骗信号,保护组合导航设备不受干扰。
")
标签: 航天通讯行业报告
相关文章

从目前环境上看,从 2019 年到 2025 年,全球火箭发射次数稳定提升,直观体现了全 球航天产业的蓬勃扩张。 除了当前全球各个国家和地区对航天产业...
2026-05-04 36 航天通讯行业报告
在经历了以 SpaceX 星链为代表的低地球轨道跑马圈地之后,全球商业航天有望开始向更低处进发。超低轨道, 这一曾被视为航天器禁区的轨道空间,正因材料...
2026-04-27 70 航天通讯行业报告

据Precedence Research报告,2024年全球火箭发射服务市场收入约186.8亿美元,预计2034年将增长至642.5亿 美元,年复合增...
2026-04-25 51 航天通讯行业报告
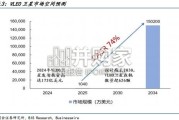
市场规模预测:全球 VLEO 卫星市场规模预计将从 2025 年的约 1,040 万美元激增至 2034 年的 15 亿美元以上,复合年增长率高达 7...
2026-04-14 69 航天通讯行业报告
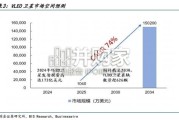
市场规模预测:全球 VLEO 卫星市场规模预计将从 2025 年的约 1,040 万美元激增至 2034 年的 15 亿美元以上,复合年增长率高达 7...
2026-04-10 98 航天通讯行业报告

Starlink(星链)是SpaceX发起并运营的低轨(LEO)卫星宽带互联网项目。通过部署数万颗卫星组成的星座,与由地面基站、用户终端形成 的地面互...
2026-04-04 63 航天通讯行业报告
最新留言