国内因安全性问题导致矿山关停或整顿的事件较多,且监管力度逐渐增强。根据《矿山安全监察系统 2024年度政府信息公开工作年度报告》,2024年全系统共作...
2026-05-25 31 智能制造行业报告
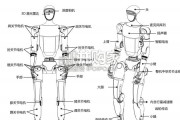
人形机器人对传感器需求量有望提升。我们认为人形机器人的加速落地,有望带动相关传感 器需求:1)与人类感官类似,人形机器人通过传感器获得周围环境信息,按照不同的设计需 求,可能有触觉、平衡、视觉、听觉、嗅觉和味觉等多种需求以适应不同工作环境;2)人形 机器人应用传感器较多,市场潜在空间大,量产后有望带动传感器需求。机器人为了完成一些复杂、精细的作业,需要对应传感器为机器人的力控制和运动控制提供力 信息,从而满足对应关节运控过程的柔顺化、智能化。因此,在机器人应用领域,力矩传感器 应用广泛。力矩传感器可以将力/力矩的量值转换为电信号,能够对机械部件的旋转扭矩进行 感知,具有精度相对较高、可靠性好等优势。按照测量方式,力传感器可以分为一维、多维(三维、六维)传感器。 1)一维传感器:可以测一个方向的力。如下图所示,一维力传感器的标定坐标轴为 OZ 轴,如 果被测量力 F 的方向能完全与 OZ 轴重合,那么此时用一维力传感器就能完成测量任务。 2)三维传感器:测三个正交方向的力。如果力的方向随机变化,但力的作用点保持不变,并 且与传感器的标定参考点重合,可以使用三维传感器。如下图所示,力 F 的作用点 P 始终与传 感器的标定参考点 O 保持重合,力 F 的方向在三维空间中随机变化,这种情况下用三维力传感 器就能完成测量任务,它可以同时测量 Fx、Fy、Fz 这三个 F 的分力。 3)六维传感器:六维传感器可同时测量沿三个坐标轴方向的力和绕三个坐标轴方向的力矩。 如下图所示,空间中任意方向的力 F,其作用点 P 不与传感器标定参考点重合且随机变化,这 种情况下就需要选用六维力传感器来完成测量任务,同时测量 Fx、Fy、Fz、Mx、My、Mz 六个分量。
")
标签: 智能制造行业报告
相关文章

国内因安全性问题导致矿山关停或整顿的事件较多,且监管力度逐渐增强。根据《矿山安全监察系统 2024年度政府信息公开工作年度报告》,2024年全系统共作...
2026-05-25 31 智能制造行业报告

供应链梳理:电机、驱动板、运控算法等核心部件自研;减速器齿轮来自美湖股份,交叉滚子轴承来自洛阳 佰纳,灵巧手来自宇树自研、因时机器人、睿尔曼、强脑科技...
2026-05-23 66 智能制造行业报告

结合前不久我们团队在硅谷调研的见闻,我们认为 Optimus 第一阶段的商业化,不一定是“完全自主替代人”,而更可能是 一种“干中学”的过渡,将“劳动...
2026-05-21 55 智能制造行业报告
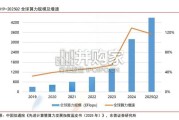
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 81 智能制造行业报告
“训练+推理”算力双轮驱动,未来全球算力需求呈指数级爆发。随着大模型快速迭代 与 AI 应用场景加速渗透,全球 AI 算力需求呈指数级爆发态势,算力基...
2026-05-17 52 智能制造行业报告
根据IDC最新报告指出,2025年全球人形机器人出货量接近1.8万台, YOY+508%,市场规模达到约4.4亿美元,主要应用于文娱商演、 科研教育、...
2026-05-17 69 智能制造行业报告
最新留言