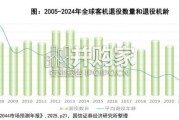
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 6 智能制造行业报告
机器人中操作和动作决策的执行输出工具在机器人学领域被称之为末端执行器 (End-Effector)。末端执行器是机器人执行部件的统称,一般安装于机器人腕部 的末端,是直接执行任务的装置。末端执行器作为机器人与环境相互作用的最后 环节与执行部件,对提高机器人的柔性和易用性有着极为重要的作用,其性能的 优劣在很大程度上决定了整个机器人的工作性能。 末端执行器按其功能可以分为两大类,即:工具类和抓手类。工具类末端执行器 是根据具体工作需求专门设计并预留标准化接口的机器人专用工具,可以直接实 现具体的加工工种、生产工艺或日常动作;抓手类机器人末端执行器恰如人的双 手,担负着执行各种动作、抓持和操作的任务。 机器人多指灵巧手是一种高度灵活、复杂的末端执行器,因其能够模仿人手的各 种灵巧抓持和复杂操作能力,得到持续的研发投入和广泛关注。从应用领域来看,目前灵巧手实现成熟应用的领域主要有:航空航天、医疗假肢、 工业及科研领域。 航空航天领域对性能的要求较高,对成本不敏感,如美国宇航中心(NASA)的 Robonaut Hand、德国宇航中心(DLR)的 DLR Hand、Dexhand;医疗假肢 是目前少有的已实现商业化批量制造的领域,如 ottobock 的 Bebionic Hand、 Michelangelo Hand;工业领域灵巧手目前由少数协作机器人夹爪企业所引领, 如 SCHUNK 公司的 SCHUNK SVH Hand、Festo 公司的 Festo ExoHand;而科 研领域主要由全球知名高校主导,灵巧手的设计思路较为开阔。 从灵巧手设计层面来看,主要有全驱动和欠驱动两种。DOF 为手指关节的自由 度,DOA 为由驱动器控制的自由度。若 DOA 小于 DOF,则为欠驱动结构;若 DOA 等于 DOF,则为全驱动结构。 全驱动手的代表包括 Robonaut Hand、Shadow Hand、DLR Hand II 等,分别 使用了 14/20/12 个驱动器,通过对每个自由度的独立控制,达到对灵巧手出色 的掌控效果。但考虑到鲁棒性和功能性之间的取舍,欠驱动灵巧手成为更主流的 选择。其优势在于通过合理的结构设计以少于手指关节自由度的驱动器,从而降 低整只手的系统复杂度,同时提高可靠性。
")
标签: 智能制造行业报告
相关文章
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 6 智能制造行业报告
DED 为金属 3D 打印的主流技术路线之一:金属 3D 打印主要技术路线为 PBF(粉末床熔融)和 DED(定向能量沉积)。 DED 属于利用聚焦热...
2026-05-06 44 智能制造行业报告

原始设计制造商(Original Design Manufacturer, ODM 是根据品牌厂商(如三星、 OPPO、小米等)的需求,为其研发、设计...
2026-05-06 27 智能制造行业报告

矿山机械全球千亿美元市场,主要包含采矿、选矿两大环节:根据 precedence research 数据,全球矿山机械市场空 间 1330.9 亿美元...
2026-05-04 32 智能制造行业报告
人形机器人的探索史可以追溯到20世纪60年代末,而迎来产业大爆发、受到业界和资本的广泛关注则仅是近几年的事。受益 于软件端大模型和硬件端零部件的发展和...
2026-04-30 84 智能制造行业报告

2021年至今的集运牛市来源于:疫情期间的极端供需错配、消费结构 扭曲、港口大面积拥堵以及后续的地缘政治冲突;周期高度由需求刺 激打开,地缘冲突增加供...
2026-04-28 41 智能制造行业报告
最新留言