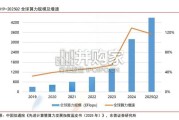
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 52 智能制造行业报告
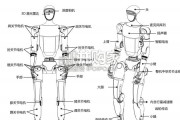
灵巧手是人形机器人的重要硬件模块,集成化、多自由度发展,或随人形机 器人产业落地打开百亿市场。灵巧手是人形机器人的末端执行器、对外交互 的重要窗口,其硬件模块包括驱动系统、传动系统及感知系统。类似人手的 灵巧手架构更适应人类生活/工作环境,在数据易得性、环境适应性等方面 更具优势。灵巧手诞生自 20 世纪 70 年代,回顾其发展历程,其发展趋势 是在小体积/重量、低成本、耐用可靠的边界条件下追求【灵活性、抓握力、 精度】的提升。特斯拉 Gen3 灵巧手自由度翻倍至 22,预计或采用【电机+ 丝杠】或【电机+减速器+丝杠】方案。经测算,在百万台销量下,灵巧手市 场空间将达近 430 亿元。 驱动系统:电驱方案为主流,空心杯电机及无刷有齿槽电机或为主要选择。 驱动系统是力量之源,在驱动结构、放置方式、方案选型等方面均存在不同 技术路线,结合性能和成本等方面的权衡,产业端基本采用欠驱动下的电机 方案。落实到电机选型上,可选方案包括直流无刷电机、空心杯电机及无框 力矩电机。空心杯具有响应迅速、转换效率高等优势,是灵巧手的优质选择。 而从边际上,特斯拉通过将执行器放置于前臂,无刷电机的体积劣势得到缓 解,凭借成本优势,其用量或显著提升。 传动系统:腱绳广泛应用,微型丝杠/微型谐波减速器等新方案产业提速。 传动系统传导来自驱动系统的运动和力,对灵巧手抓取稳定性、精度、灵活 性有重要作用。其存在较大路线分歧,我们认为腱绳方案凭借远距传动、灵 活柔性等优势,在多自由度趋势下或被广泛采用,其寿命、负载等方面的劣 势有望随材料端优化而缓解。微型丝杠、微型谐波减速器为新兴传动结构, 在精度、承载力等方面各具优势,随产业成熟推动降本后或广泛应用,五洲 新春、绿的谐波等国内企业正积极入局研发。 感知系统:智能化的重要基础,产业发展步入快车道。感知系统按照感知区 域可分为内部/外部传感器,前者感知手部自身状态,包括力矩/位置/弯曲 传感器,后者感知外界环境,包括接近觉/触觉传感器。一维力传感器多用 于手指关节处,技术相对成熟。六维力传感器用于手腕、脚踝处,可为机器 人提供更精准的力感信息,提升其柔顺控制水平,国内如柯力传感、东华测 试等公司积极推进研发及送样进程。柔性触觉传感器具备良好的延展性及 柔韧性,或应用于手指及掌部,国内企业及院校积极推进产业提速。
")
标签: 智能制造行业报告
相关文章
市场空间:从新能源汽车看人形机器人产业跃迁路径,十年百倍。 根据赛迪数据,2025 年全球人形机器人市场出货量约 1.7 万台,迈 入初步规模化的转折...
2026-05-19 52 智能制造行业报告
“训练+推理”算力双轮驱动,未来全球算力需求呈指数级爆发。随着大模型快速迭代 与 AI 应用场景加速渗透,全球 AI 算力需求呈指数级爆发态势,算力基...
2026-05-17 33 智能制造行业报告
根据IDC最新报告指出,2025年全球人形机器人出货量接近1.8万台, YOY+508%,市场规模达到约4.4亿美元,主要应用于文娱商演、 科研教育、...
2026-05-17 47 智能制造行业报告

从宏观角度来看, 2020 年开始家用咖啡机市场需求增速加快,商用咖啡机市场需求放缓,原因如下:2010 -2020 年,资本进入商用咖啡机快速爆发,...
2026-05-14 40 智能制造行业报告
2025 年,为推动热泵行业高质量发展,助力经济社会全面绿 色低碳转型,国家相关部委积极制定相关政策措施。包括空气源 热泵高效舒适供热等关键技术被纳入...
2026-05-12 30 智能制造行业报告
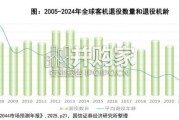
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 61 智能制造行业报告
最新留言