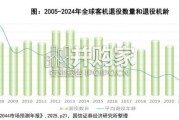
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 12 智能制造行业报告
什么是人形机器人“小脑”:人形机器人的“小脑”主要为了实现轨迹规划和运动控制(肢体驱动、姿态平衡等),主 要由控制器+伺服驱动器+电机+传感器构成。控制原理与工业机器人、工业母机等高端装备类似,但需要处理多维度 的输入信号和更高自由度的运动控制,同时控制策略更难,需要基于强化学习的控制技术、基于动力学的模型预测控 制技术等技术支撑和融合创新,我们认为在人形机器人产业化成熟的历程中会涌现较多投资机会,有望成为重要的主 赛道。 人形机器人“大脑”快速迭代,“小脑”重要性日渐提升:Figure 的 VLA 模型是人形机器人“大脑”的一个重大技术 突破,通过部署两个模型解决了 VLM 模型基础架构通用性强但响应速度较慢的问题,“大脑”的成熟有迹可循,且在 新技术、新架构的推动下正在快速迭代。而“小脑”由于主要是负责运动控制的落地,由于其技术路线上的高壁垒和 复杂性,很难通过弯道超车实现突破,或成为人形机器人产业化的“卡脖子”环节,后续的重要性有望日渐提升。 “小脑”的潜在商业模式有哪些:1)第三方模式:通过提供标准化运动控制解决方案,实现规模效应,支撑研发投 入。类似数控系统领域的龙头企业发那科,在数控机床行业成功实现了高壁垒和通用性强的商业模式,下游主机厂很 难通过自研实现替代;2)一体化模式:企业从创立之初就专注于运控技术开发,后续逐步发展为软硬一体的布局, 凭借其在运控技术上的稀缺性积累形成竞争优势;3)深度合作二次开发:制造业龙头企业可能采取这种模式,与“小 脑”第三方供应商进行合作,在供应商的运动控制系统平台上进行深度二次开发,快速实现产业化落地,并掌握一定 运控技术的核心壁垒,从而加速切入人形机器人领域,实现后发制人。
")
标签: 智能制造行业报告
相关文章
机队更新:客机退役和减排降本是未来大规模进行机队替换的核心动因。据波音公司预测,当前在役客机中将有 21110架在2044年之前更新,占比当前在役客机...
2026-05-09 12 智能制造行业报告
DED 为金属 3D 打印的主流技术路线之一:金属 3D 打印主要技术路线为 PBF(粉末床熔融)和 DED(定向能量沉积)。 DED 属于利用聚焦热...
2026-05-06 44 智能制造行业报告

原始设计制造商(Original Design Manufacturer, ODM 是根据品牌厂商(如三星、 OPPO、小米等)的需求,为其研发、设计...
2026-05-06 27 智能制造行业报告

矿山机械全球千亿美元市场,主要包含采矿、选矿两大环节:根据 precedence research 数据,全球矿山机械市场空 间 1330.9 亿美元...
2026-05-04 32 智能制造行业报告
人形机器人的探索史可以追溯到20世纪60年代末,而迎来产业大爆发、受到业界和资本的广泛关注则仅是近几年的事。受益 于软件端大模型和硬件端零部件的发展和...
2026-04-30 84 智能制造行业报告

2021年至今的集运牛市来源于:疫情期间的极端供需错配、消费结构 扭曲、港口大面积拥堵以及后续的地缘政治冲突;周期高度由需求刺 激打开,地缘冲突增加供...
2026-04-28 41 智能制造行业报告
最新留言