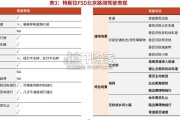
相比新车质量评价体系中的其他维度,中国消费者遇到产品质量问题/抱怨 最多的维度是“行驶过程”,其次是“电子设备”及“内饰”, 而遇到问题最少的则是“座...
2025-04-16 40 汽车行业报告
自动驾驶壁垒深厚:海量数据收集,用户数据驱动 • “影子模式”驱动机器学习,特斯拉通过车队获得大量驾驶数据,即便是在未开启的状态下, Autopilot也可以记录并回传感知数据以及驾驶员的操作,搭载HW2/3级别的车辆均为特斯拉的自动驾驶 车队,目前约80万辆+,远远领先行业第二名Waymo的1000辆。 海量数据领先全行业:截止到今年 4 月,基于 Autopilot 的里程数已经达到 30 亿英里,占全行业总路测 数据的99%以上。特斯拉可以获得每天2000万英里的真实、多元的行驶场景,几乎等于Waymo车队的 全部累计行驶里程。自动驾驶壁垒深厚: 坚定视觉解决方案,FSD beta版采取四维数据采集 。坚定使用视觉方案解决L4级别自动驾驶。目前来看普遍使用的L4级别及以上的自动驾驶方案为激光雷达方案, 是目前探测距离最长、分辨率最高的传感器方案,但特斯拉坚定依靠视觉方案代替激光雷达,通过重写FSD算 法,转向4D方案,解决了视觉方案中置信度低、受极端天气影响等问题,将系统能力从 L2 进化至 L4。 Autopilot走向4D,满足L4级别要求。特斯拉从HW2.0开始一直使用硬件为8个摄像头、12个超声波雷达和1个前 置毫米波雷达的数据采集方案,特斯拉将Autopilot 从 2.5D(带有2D标注的图像)升维到 4D(空间+时间), 可以使用从视频中重建的3D立体场景以及时间戳,从而提升 Autopilot 对于周遭环境的理解能力。
FSD 重写版达到自动驾驶新高度。10月起特斯拉开始推送FSD beta版,对底层架构进行了重写,通过视觉图像 处理的4D逻辑模拟激光雷达的工作原理,在没有高精度地图覆盖的地区也能完成自动驾驶,AP 新版本的深度 神经网络会将包括感知、路径规划、目标识别等所有子神经网络综合于一体,离L4级别自动驾驶更近一步。自动驾驶壁垒深厚:自监督学习技术大幅优化算法提升效率 。自研神经网络训练计算机 Dojo,是实现4D数据处理的基础:FSD重写后采集的4D数据需要极强的数据分析能 力和算力,特斯拉开发神经网络训练计算机 Dojo处理视频视觉,Dojo能够从车端接收大量视频数据,发回到 云端,云端完成无监督的大规模算法训练(Dojo 支持以 FP32 的速度以 1 Exaflop 的速度进行计算,满足处理 视频数据的计算能力需求),再推送到车端,完成整个流程的闭环。 Dojo 可自动处理视频数据,自动训练自动驾驶模型。自监督学习是指用于机器学习的标注(ground truth)源 于数据本身,而非来自人工标注。此前,特斯拉AP团队拥有超过 500 名熟练的数据标注员,用来标注搜集来 的高价值数据。而Dojo可以自动处理视频类的数据,通过自动化的工具主动选取最有指导意义的训练样本,筛 选、清洗、标注这些视频片段,然后完成高效的算法提升。
")
标签: 汽车行业报告
相关文章

相比新车质量评价体系中的其他维度,中国消费者遇到产品质量问题/抱怨 最多的维度是“行驶过程”,其次是“电子设备”及“内饰”, 而遇到问题最少的则是“座...
2025-04-16 40 汽车行业报告

全地形车制造属性强,产能围绕消费市场布局。全地形车在销售前需要经过生产 和组装两个环节,以 Polaris 为例,全地形车核心零部件(发动机、车架、轮...
2025-04-15 43 汽车行业报告
特斯拉FSD入华,中美差异+监管制约导致FSD本地化不足:2/25特斯拉中国官方发布2024.45.32.12 软件更新、并开启分批次推送。我们针对特...
2025-04-11 45 汽车行业报告

新能源车重量和智能驾驶对 EPS 升级提出了更高的要求。EPS 的核心参数中,传动比 和齿条力是重点影响性能的关键因素。电动化:电动汽车的普及使得车辆...
2025-04-10 36 汽车行业报告
2025年有望成为国内L3上车元年。2024年12月,特斯拉发布FSD V13.2更新,实现“从停车位到停车位”的端到端驾驶模式 。目前国内鸿蒙智行、...
2025-04-03 88 汽车行业报告

打造爆款车的策略有两种:对标跟进和差异化领先,而不同时代的红利下同一竞争 策略也有不同之处,我们应当结合时代红利+竞争阶段采取对应的爆款车打造策略。...
2025-03-31 79 汽车行业报告
最新留言